
机器人SLAM建图与自主导航
前言 这篇文章我开始和大家一起探讨机器人SLAM建图与自主导航 ,在前面的内容中,我们介绍了差速轮式机器人的概念及应用,谈到了使用Gazebo平台搭建仿真环境的教程,主要是利用gmapping slam算法,生成一张二维的仿真环境地图 。我们也会在这篇文章中继续介绍并使用这片二维的仿真环境地图,用于我们的演示。 教程 SLAM算法的引入 (1)SLAM:Simul...
深度学习之基于视觉的机器人导航
基于深度学习的视觉机器人导航是一种通过深度学习算法结合视觉感知系统(如摄像头、LiDAR等)实现机器人在复杂环境中的自主导航的技术。这种方法使机器人能够像人类一样使用视觉信息感知环境、规划路径,并避开障碍物。与传统的导航方法相比,深度学习模型能够在动态环境中表现出更强的适应能力和鲁棒性。 1. 视觉导航的基本概念 视觉导航是指通过处理机器人的摄像头等视觉传感器采集到的图像数据,构...
植保机器人环境感知地理定位与导航
植保机器人环境感知、地理定位与导航是其在农田或温室中高效作业的核心技术。以下是如何整合这些功能实现精准和自主化作业的概述: 环境感知: 视觉传感器:通过摄像头采集图像,利用计算机视觉技术识别作物、病虫害及障碍物。激光雷达(LiDAR):进行3D扫描,获取周围环境的精确距离信息ÿ...
植保机器人自主导航
植保机器人自主导航是指植保机器人能够在农田、温室等复杂环境中,无需人工干预而独立地进行路径规划和移动的技术。实现这一功能通常依赖于多种技术和算法的集成,以下是一些关键技术和方法: 定位技术: GPS/RTK(全球卫星定位系统/实时动态载波相位差分):用于提供室外大范围精确的位置信息。室内或温室环境下...
RPA有哪些常用操作_机器人流程自动化
阿里云RPA官网:包括产品介绍、试用申请、伙伴申请等内容阿里云RPA官网:https://www.aliyun.com/product/codestore阿里云RPA4.0版本用户手册:https://help.aliyun.com/product/55838.html码栈Pro产品:https:/...
移动机器人和UGV的自主导航(Matlab代码&Simulink)
1 概述本文包含用于开发移动机器人和无人地面车辆 (UGV) 的自主导航软件堆栈的 MATLAB® 和 Simulink® 示例。本提交中包含的示例演示了如何与支持 ROS 的机器人和等效模拟进行交互,以设计和测试用于 Turtlebot3 自主导航的软件堆栈。2 运行结果plot(waypoints(:,1),waypoints(:,2),'go-',pathX,sPathY,'b-',.......
获取机器人turtlebot3 在gazebo 中仿真导航时的位姿真值
背景:机器人在gazebo环境中仿真导航,除了实时获取传感器数据估计机器人位姿外,为了验证定位算法的精度,我们需要获得机器人在gazebo worlds下的真实位姿。方法一:在机器人模型的urdf文件或者sdf文件中加入一个ros plugin——libgazebo_ros_p3d。以turtlebot3_waffle_pi 为例:(1)找到 turtlebot3 gazebo 模型的descr....
ROS中阶笔记(八):机器人SLAM与自主导航—机器人自主导航
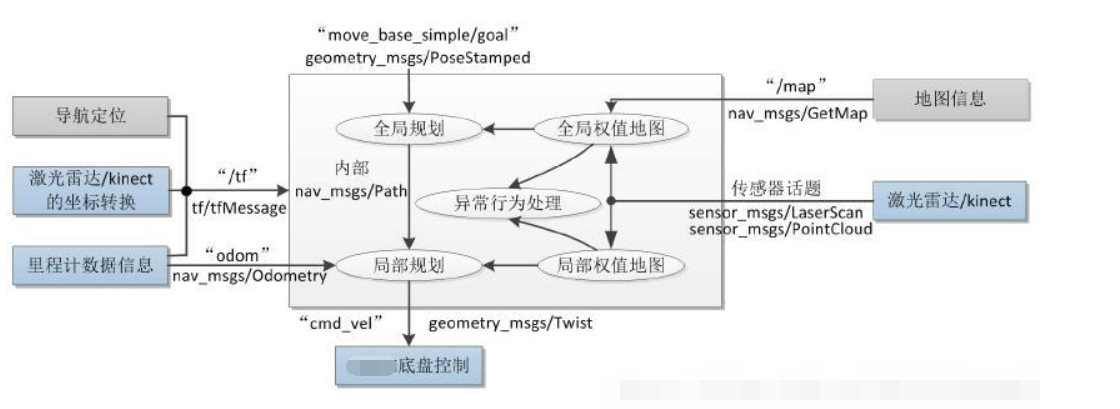
1 ROS中的导航框架1.1 move_base1.1.1 基于move_base的导航框架其中白色框内的是ROS已经为我们准备好的必须使用的组件,灰色框内的是ROS中可选的组件,蓝色的是用户需要提供的机器人平台上的组件。1.1.2 安装$ sudo apt-get install ros-kinetic-navigation1.2.3 全局、局部路径规划1、全局路径规划(global plan....
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(下)
2.2.4 启动hector_slam演示分别开启三个终端运行以下命令:$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 动一个gazebo仿真节点 $ roslaunch mbot_navigation hector_demo.launch # hector建图节点 $ roslaunch mbot_teleop mb...
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(上)
1 机器人必备条件1.1 硬件要求(1)差分轮式机器人,可使用twist速度指令控制$ rosmsg show geometry_msgs/Twist geometry_msgs/Vector3 linear # linear:xyz方向上的线速度,单位是m/s; float64 x float64 y float64 z geometry_msgs/Vector3 angula...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
