
使用钉钉机器人通知GitOps应用变更
使用GitOps发布应用时,可以配置多种通知服务(例如Email、钉钉等)用于接收应用的重要变化。当应用发布异常时您可以快速收到通知提醒。本文以发送钉钉消息为例,介绍如何在GitOps中发送通知。
如何实现对话机器人的网页应用和小程序对话窗部署
渠道部署是对话机器人为客户提供的快速接入功能,目前支持H5咨询窗口、PC的部署方式,支持卡片、模板等多种运营手段,丰富对话首页,可参考本文档将智能对话机器人快速接入到您的业务中
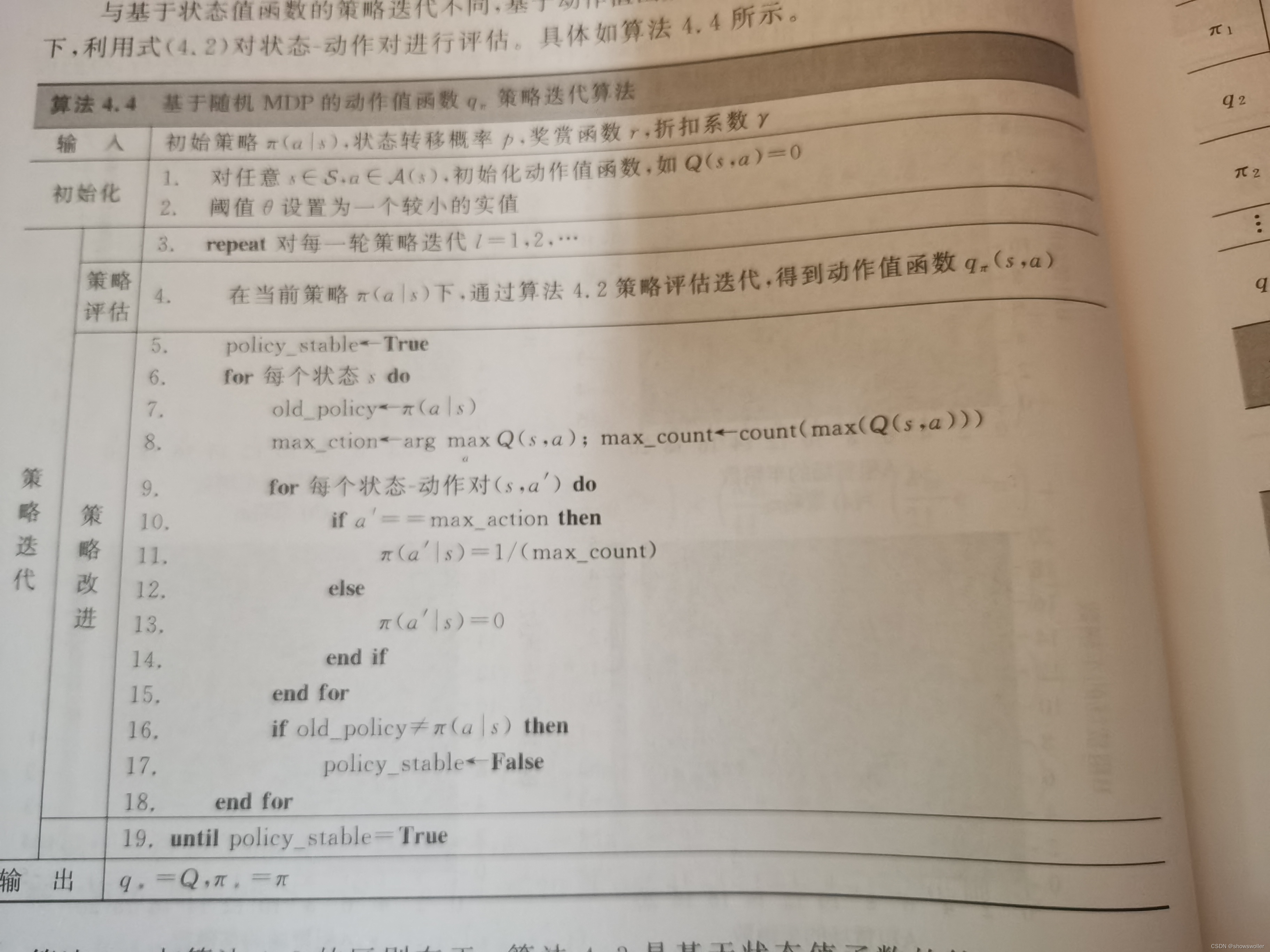
动态规划法在扫地机器人中的实战应用(基于动作值函数的策略迭代 python 附源码)
需要源码或觉得有帮助请点赞关注收藏后评论区留下QQ邮箱或者私信博主与基于状态值函数的策略迭代不同,基于动作值函数的策略迭代是在当前策略下用另一个式子进行评估。关于条件描述和环境搭建可以参考我这篇博客扫地机器人简介算法步骤如下下面通过基于动作值函数的策略迭代算法应用于确定环境的扫地机器人任务中,经过多轮迭代后,得到下图中动作值函数和策略迭代的更新过程 代码运行结果如下 经过五次迭代逐渐收敛 部分代....
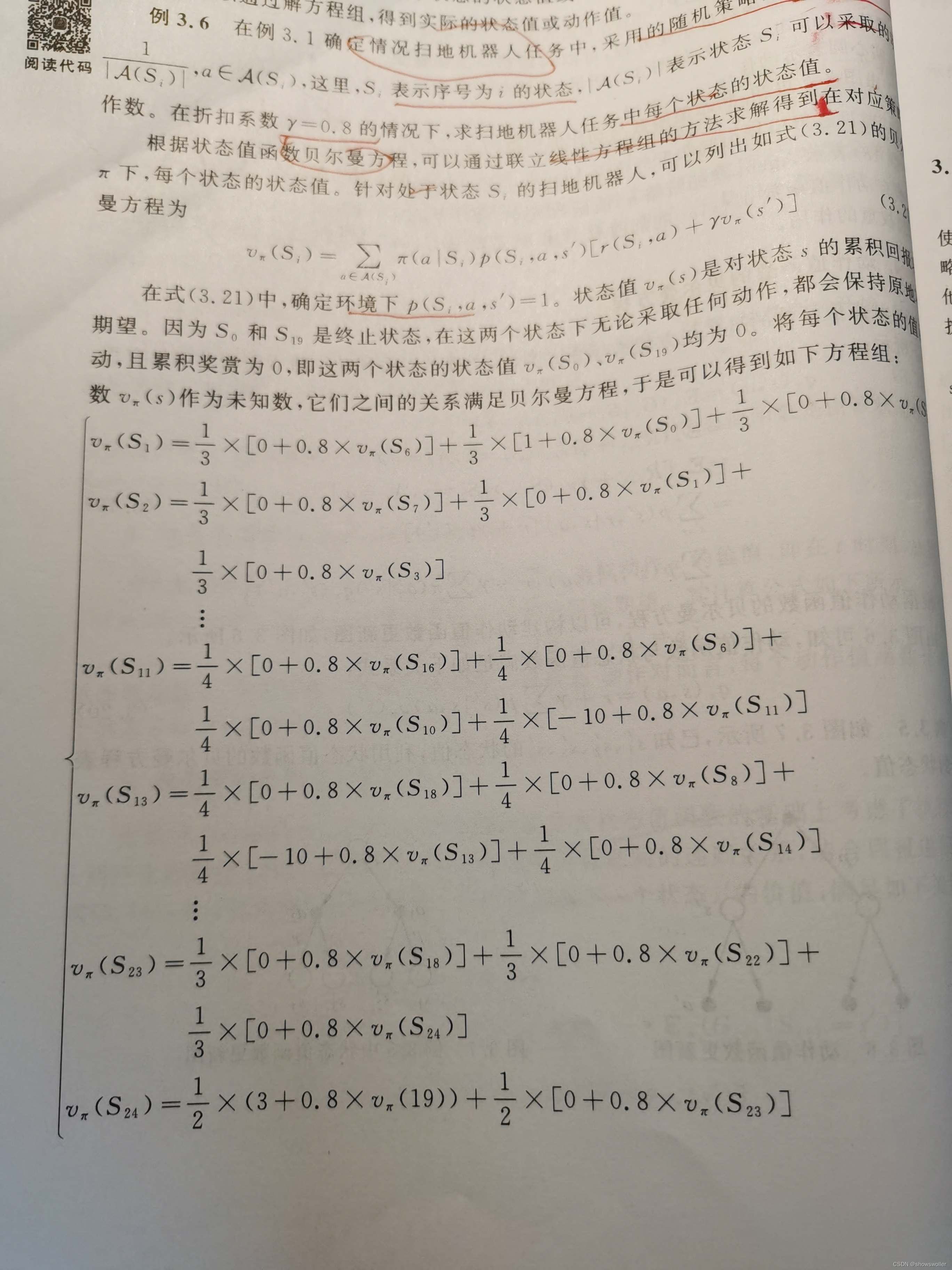
马尔可夫决策过程与贝尔曼方程在扫地机器人中的应用(求解状态值和最优状态值函数和策略)
需要源码请点赞关注收藏后在评论区留下QQ邮箱马尔可夫决策过程(MDP)是强化学习的数学理论基础,马尔可夫决策过程以概率形式对强化学习任务进行建模,并对强化学习过程中出现的状态 动作 状态转移概率和奖赏等概念进行抽象表达。从而实现对强化学习任务的求解,即得到最优策略,获得最大累计奖赏。关于扫地机器人环境动画的搭建 可以参考我这篇文章 搭建机器人环境马尔可夫决策过程1:马尔可夫性质在某一任务中 如果....
如何使用组件获取当前执行应用id
1. 组件介绍说明必要前置组件:无利用本组件可以获取当前执行应用id2. 输入项说明请参照可视化编辑器内组件面板中各输入项的帮助信息3. 输出项说明请参照可视化编辑器内组件面板中各输出项的帮助信息4. 组件使用示例4.1. 组件配置示例高级选项保持默认值4.2. 示例执行结果无5. 流程搭建示例搭建...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
