
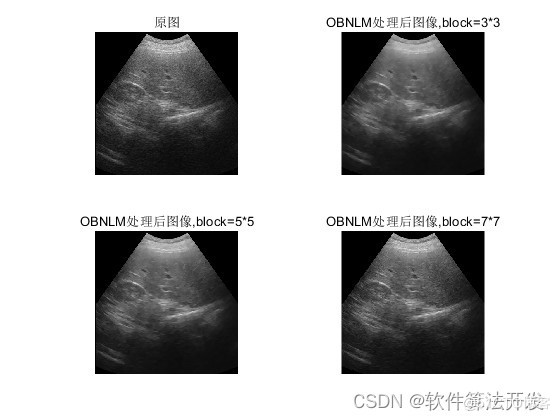
基于分块贝叶斯非局部均值优化(OBNLM)的图像去噪算法matlab仿真
1.程序功能描述 基于分块贝叶斯非局部均值优化(OBNLM)的图像去噪算法matlab仿真,对比不同的参数对OBNLM算法的影响。 2.测试软件版本以及运行结果展示MATLAB2022A版本运行 3.核心程序```Im0 = imread('test.png');Blks1 = 3;Blks2 ...
图像处理之积分图应用四(基于局部均值的图像二值化算法)
图像处理之积分图应用四(基于局部均值的图像二值化算法) 基本原理 均值法,选择的阈值是局部范围内像素的灰度均值(gray mean),该方法的一个变种是用常量C减去均值Mean,然后根据均值实现如下操作: pixel = (pixel > (mean - c)) ? object : background 其中默认情况下参数C取值为0。object表示前景像...

【MATLAB】语音信号识别与处理:一维信号NLM非局部均值滤波算法去噪及谱相减算法呈现频谱
1 基本定义 一维信号NLM非局部均值滤波算法是一种基于非局部均值思想的滤波方法,它通过对信号进行分块,计算每个块与其他块之间的相似度,以非局部均值的方式去除噪声。该算法的主要思想是在一定范围内寻找与当前块相似的块,以这些块的非局部均值作为当前块的估计值,以达到去除噪声的效果。 具体来说,一维信号NLM非局部均值滤波算法的步骤如下: 将信号分成多个块,每个块的大小为w...

非局部均值滤波算法(NL-means)下
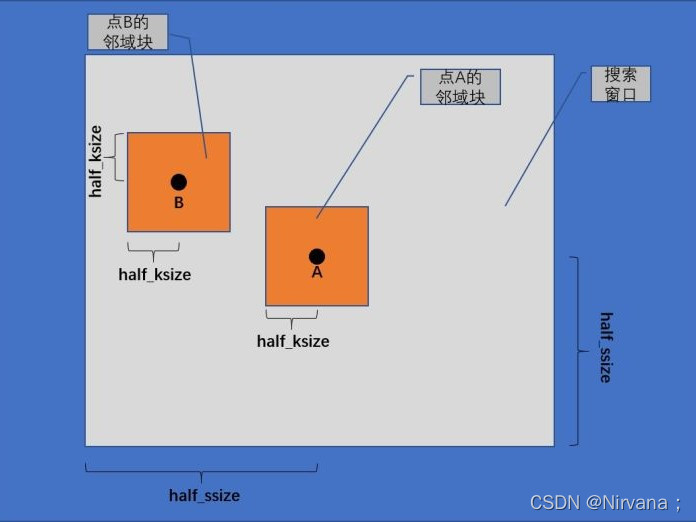
理论上,该算法需要在整个图像范围内判断像素间的相似度,也就是说,每处理一个像素点时,都要计算它与图像中所有像素点间的相似度。但是考虑到效率问题,实现的时候,会设定两个固定大小的窗口:搜索窗(2*half_ssize+1)*(2*half_ssize+1)和邻域窗口(2*half_ksize+1)*(2*half_ksize+1)。邻域窗口在搜索窗口中滑动,根据邻域间的相似性确定像素的权值。点A的....
非局部均值滤波算法(NL-means)上
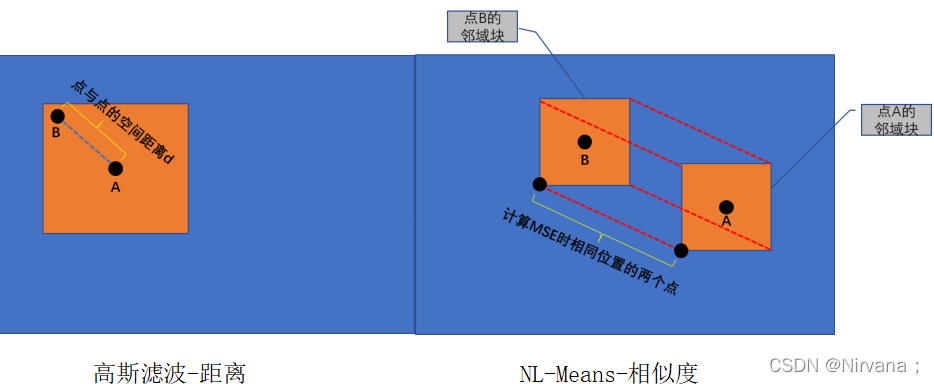
上一篇文章介绍了均值滤波、中值滤波、高斯滤波、双边滤波和引导滤波,均为局部滤波,即对周围邻域的点加权生成当前点,加权因子反应出周围点对当前点的影响。非局部滤波就意味着它使用图像中的所有像素,这些像素根据某种相似度进行加权平均。滤波后图像清晰度高,而且不丢失细节。与上述算法思路不同,前者根据像素点之间的距离计算权重,后者根据块之间的相似度计算权重。其核心思路与高斯滤波很相似:计算矩形窗口内所有像素....
【图像去噪】基于回归的非局部均值算法实现图像去噪附matlab代码
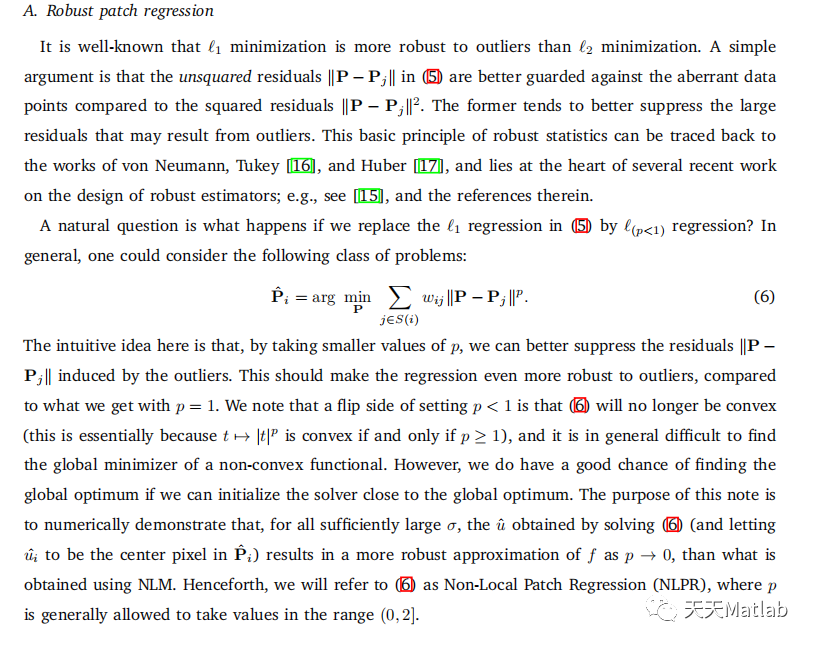
1 简介It was recently demonstrated in that the denoising performance of Non-Local Means (NLM)can be improved at large noise levels by replacing the mean by the robust Euclidean median. Numerical ....
【图像增强】基于双边滤波和局部均值算法实现图像光照增强附matlab代码
1 简介图像的获取过程存在各种不确定因素,易导致其质量下降 或 退 化,常常需要利用图像增强技术,改善其视 觉 效 果。图像增强是对图像进行分析的预处理环节,即将图像转换成更适合于人眼观察和机 器 分 析 识 别 的 形 式,以 突 出 图 像 细 节 和 对比度。基于空域的直接增强算法,可对图像灰度进行处理,包 括 Gamma校 正 法、对 比 度 拉 伸 法、直 方 图均衡化、小波变换法等。....
图像处理之积分图应用四(基于局部均值的图像二值化算法)
图像处理之积分图应用四(基于局部均值的图像二值化算法) 基本原理 均值法,选择的阈值是局部范围内像素的灰度均值(gray mean),该方法的一个变种是用常量C减去均值Mean,然后根据均值实现如下操作: pixel = (pixel > (mean - c)) ? object : background 其中默认情况下参数C取值为0。object表示前景像素,background...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。

智能引擎技术
AI Online Serving,阿里巴巴集团搜推广算法与工程技术的大本营,大数据深度学习时代的创新主场。
+关注