
【零代码研发】OpenCV实验大师工作流引擎C++ SDK演示
OpenCV开发痛点 传统图像算法开发最好的开源解决方案是OpenCV视觉库,但是OpenCV中收录了2000+的传统算法,包含上百个模块。实际常用的只有二十几个模块里面的相关算法与算子在工程项目中会被高频使用,掌握这些模块,就能够像拼积木跟玩乐高一样,设计不同的传统图像处理算法流程,完成不同图像预处理与图像分析、模板匹配等操作。但是对于OpenCV开发者来说,每次项目开发都要重写大量代...

【见微知著】OpenCV中C++11 lambda方式急速像素遍历
C++11 lambda语法 C++11中引入了lambda表达式,它支持定义一个内联(inline)的函数,作为一个本地的对象或者一个参数。有了lambda表达式,就可以很方便的使用stl标准库,它的标准语法如下: [...](...) mutable throwSpec -...

【实战项目】网络编程:在Linux环境下基于opencv和socket的人脸识别系统--C++实现
前言 这里我们会实现一个项目:在linux操作系统下基于OpenCV和Socket的人脸识别系统。 一、项目介绍 项目简介:我们的项目是在linux操作系统下基于OpenCV和Socket的人脸识别系统。 客户端: 用于向...
Opencv(C++)学习系列---Laplacian拉普拉斯边缘检测算法
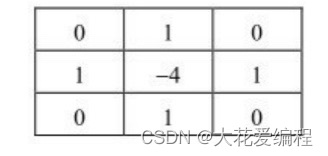
【1】算法简介 Laplacian(拉普拉斯)算子是一种二阶导数算子,其具有旋转不变性,可以满足不同方向的图像边缘锐化(边缘检测)的要求。通常情况下,其算子的系数之和需要为零。 Laplacian算子具有各方向同性的特点,能够对任意方向的边缘进行提取,具有无方向性的优点,因此使用Laplacian算子提取边缘不需要分别检测X方向的边缘和Y方向的...
Opencv(C++)学习系列---Sobel索贝尔算子边缘检测
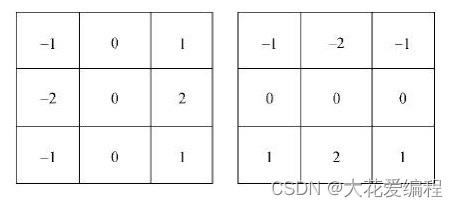
【1】算法简介 Sobel算子是一种用于边缘检测的线性滤波器,如果把图像看做是一个二维函数,那么Sobel算子就是图像在垂直和水平方向上变化的速度(即梯度)。Sobel算子在水平和垂直方向上做像素值的差分,能够得到图像梯度的近似值,在像素周围进行运算时,能够减少噪声带来的影响。 其对应的内核函数为: ...
Opencv(C++)学习系列---Canny边缘检测算法
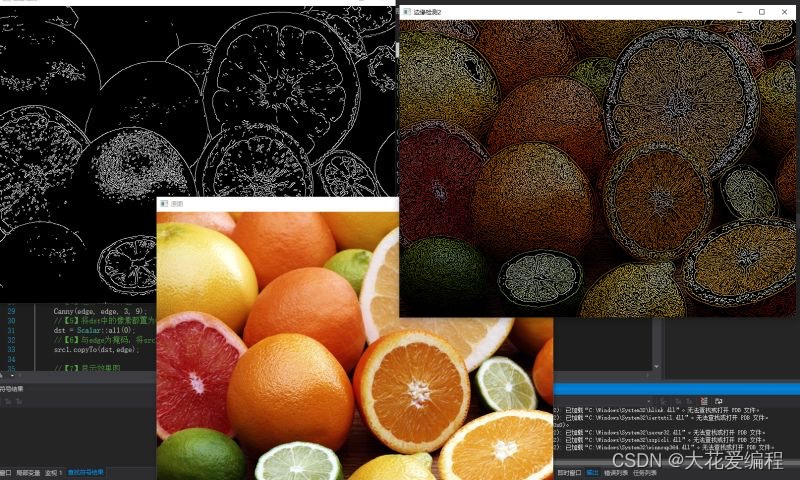
【1】边缘检测算法流程 使用高斯滤波器来平滑图像,达到滤除噪声的效果。(降噪) 计算图像中每个像素点的梯度大小和方向(求梯度,与sobel算法求梯度一致) 使用非极大值抑制,消除边缘检测带来的不利影响(非极大抑制) 使用双域值法监测确定真实和潜在的边缘(双域值检测) 通过抑制孤立的弱边缘完成边缘检测(抑制弱边缘) ...
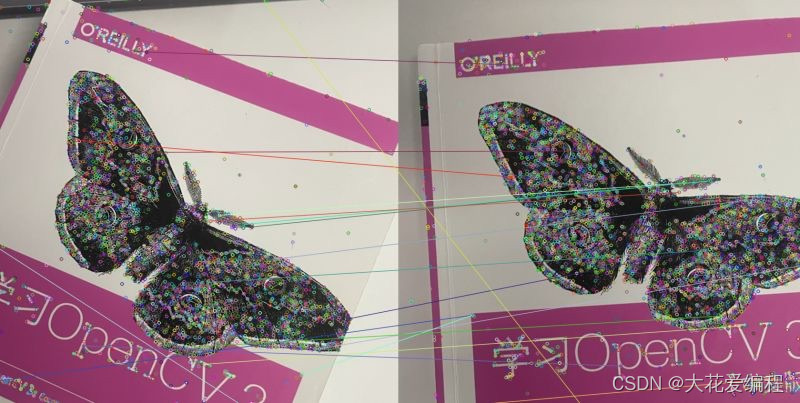
Opencv(C++)学习系列---特征点检测和匹配
关于特征检测和匹配的具体原理会在后续的文章中具体讲解,本文主要介绍Opencv实现的简单过程: 第一步:定义特征检测器(SIFT,SURF,ORB等)。 第二步:对图像中特征点进行检测,并将特征点存储在Keypoints中。 第三步:提取特征点的描述信息。 第四步:定义特征匹配器(特征匹配的方法主要有两种分别为暴力匹配BFmatch和FlannBased)。 ...
Opencv(C++)系列学习---opencv_contrib安装
前言 由于OpenCV功能越来越臃肿,OpenCV3改变了项目架构,使用内核+插件的架构形式。 因此,OpenCV从2.x到3.x是一个很大的转变,对于很多功能不完善、性能不稳定的模块,都被放到了extra_modules(扩展模块)里面了。在Github中,除了存放正式版OpenCV的主仓库和新增加的OpenCV_e...

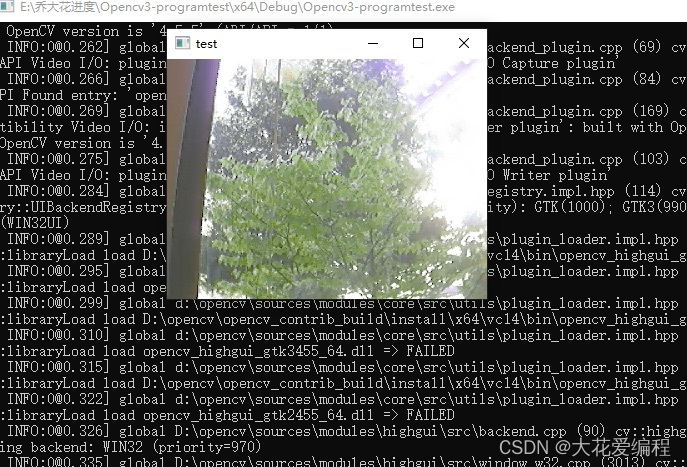
Opencv(C++)系列学习---读取视频文件和打开摄像头
今天学习的这两个内容比较简单,话不多说,直接上代码! 【1】读取视频文件 #include<iostream> #include<opencv2\imgproc\...
Opencv(C++)系列学习---SIFT、SURF、ORB算子特征检测
对于特征检测和描述子的运行原理本文先不做具体介绍,在后续的更新中会依次详细解释。本文主要介绍常用三种特征检测算法的参数信息和简单应用。 1.SIFT、SURF、ORB三种算子的参数介绍 【1】SIFT算子定义介绍 ...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
OpenCV c++相关内容
人工智能
了解行业+人工智能最先进的技术和实践,参与行业+人工智能实践项目
+关注