
ROS2教程 04 话题Topic
一、ROS2 话题Topic 示意图 ROS2的Topic可以是一对一,一对多,多对一,多对多,同一个话题Topic可以被不同的节点Node订阅与发布 二、与ros1区别 topic下有多种命令,以下是ros1的topic命令:可以看到和ros2的topic没有什么区别 Commands: rostopic bw display bandwidth used by topic ro...
[ROS2] --- topic
1 topic通信机制 1.1 发布/订阅模型 Topic通信模型是一种发布订阅模型,ROS2使用了基于DDS的发布/订阅模型,数据传输过程如下图: 话题数据传输的特性是从一个节点到另外一个节点,发送数据的对...
![[ROS2] --- topic](https://ucc.alicdn.com/pic/developer-ecology/nlrwbhh5km45g_b43e7c4d7b18431888f22b96b795956d.png)
ROS Topic 相关API接口与命令行介绍
一、Topic 1.1 常用函数接口 ros::Publisher类 // 两个重载函数模板,用于发布topic消息 template <typename M> void publish(const boost::shared_ptr<M>& message) const template <typename M> void publi...
【4. ROS的主要通讯方式:Topic话题与Message消息】(2)
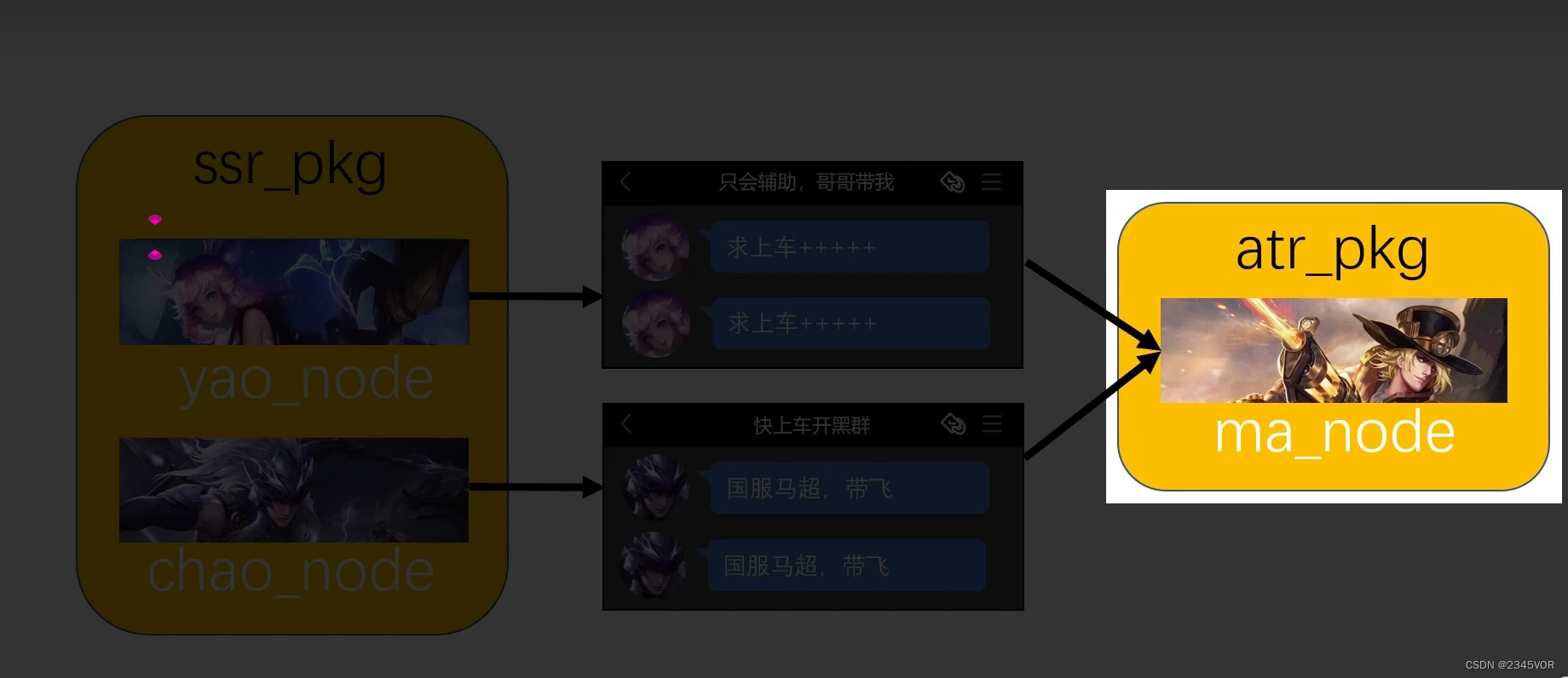
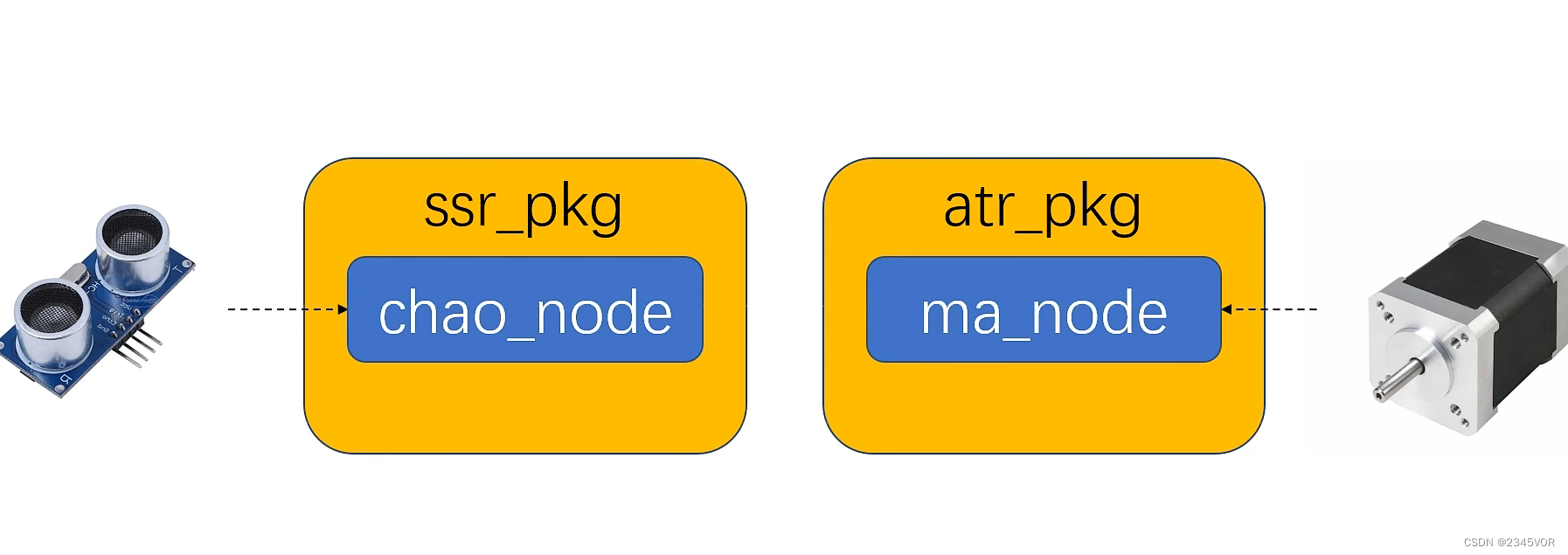
6. 使用C++实现Subscriber订阅者根据需求创建atr_pkg包的ma_node订阅节点6.1 创建订阅者节点创建Package软件包创建在~/catkin_ws/src文件夹里catkin_create_pkg<包名><依赖项列表>catkin_creat_pkg atr_pkg rospy roscpp std_msgs新建src文件夹的ma_node.cp....
【4. ROS的主要通讯方式:Topic话题与Message消息】(1)
1. 前言本教程是B站阿杰视频的笔记视频地址:https://www.bilibili.com/video/BV1qa41137ED1.1 王者解释结点通讯:话题topic发布者publisher订阅者subsciber1.2 通讯小结话题Topic是节点间进行持续通讯的一种形式。话题通讯的两个节点通过话题的名称建立起话题通讯连接。3.话题中通讯的数据,叫做消息Message。消息Message....
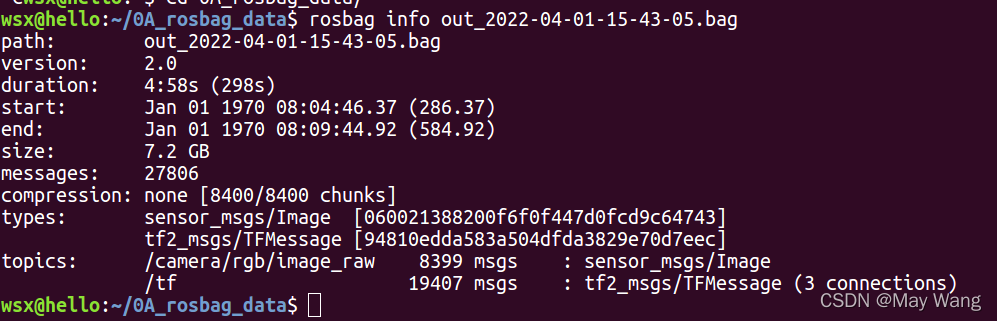
ros_gazebo/turtlebot3 室内仿真导航,提取camera/image和pose位姿真值,并将topic 时间同步对齐,最后制作成kitti 格式的数据集。
(1)ros_gazebo turtlebot3 室内环境导航仿真。参考ubuntu 16.04+ros kinetic + gazebo+ aws-robotics 室内环境导航仿真_May Wang的博客-CSDN博客$ cd catkin_ws $ source develop/setup.bash $ expore TURTLEBOT3_MODEL=waffle_pi $ roslaun....
ros2_tutorials —— topic使用
1 tutorial 1(initial_env_test)1.1 功能介绍环境搭建,打印一句话1.2 代码头文件tutorials_topic_demo1_initial_env.hpp#include <chrono> #include <memory> #include <string> #include "rclcpp/rclcpp.hpp" #in.....
ROS Topic in roscpp 通信
topic 简介Topic是ROS里一种异步通信的模型,,一般是节点间分工明确,有的只负责发送,有的只负责 接收处理。对于绝大多数的机器人应用场景,比如传感器数据收发,速度控制指令的收发, Topic模型是最适合的通信方式。ROS中的通信方式中,topic是常用的一种。对于实时性、周期性的消息,使用topic来传输是 最佳的选择。topic是一种点对点的单向通信方式,这里的“点”指的是node,....

本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
