
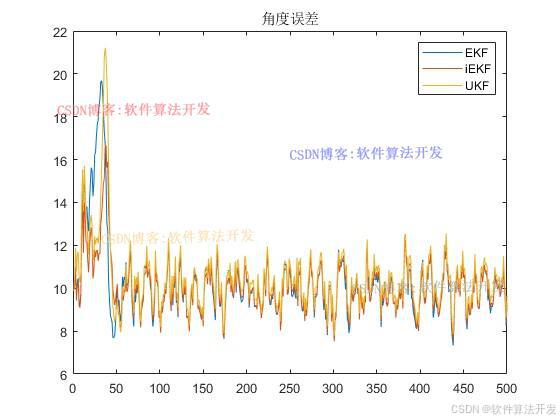
基于IEKF迭代扩展卡尔曼滤波算法的数据跟踪matlab仿真,对比EKF和UKF
1.程序功能描述 基于IEKF迭代扩展卡尔曼滤波算法的数据跟踪matlab仿真,对比EKF和UKF.仿真输出误差收敛曲线和误差协方差收敛曲线。 2.测试软件版本以及运行结果展示MATLAB2022A版本运行 (完整程序运行后无水印) 3.核心程序 ```for i=1:Lekf-1 z ...
基于梯度流的扩散映射卡尔曼滤波算法的信号预处理matlab仿真
1.程序功能描述 基于梯度流的扩散映射卡尔曼滤波算法的信号预处理matlab仿真。设置不同的噪声大小,测试滤波效果。 2.测试软件版本以及运行结果展示MATLAB2022A版本运行 3.核心程序 ```% 加载数据load data.mat SNR = 10; % 信噪比Dims = 2; % ...

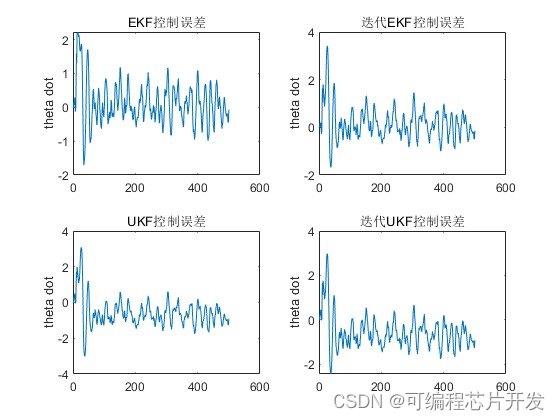
基于迭代扩展卡尔曼滤波算法的倒立摆控制系统matlab仿真
1.课题概述 基于迭代扩展卡尔曼滤波算法的倒立摆控制系统,对比UKF,EKF迭代UKF,迭代EKF四种卡尔曼滤波的控制效果。 2.系统仿真结果 3.核心程序与模型版本:MATLAB2022a X_iukf = zeros(2, Times1); X_iukf(:,1) = state0; P_iukf = zeros(2,2,Times1); P_iuk...
基于卡尔曼滤波的系统参数辨识matlab仿真
1.程序功能描述 通过kalman滤波的方法,对系统的参数进行辨识,整个程序仿真输出参数辨识的收敛过程,参数辨识误差,参数辨识之后系统的输出和真实的系统输出误差,最后设置不同的信噪比,对比不同干扰下的系统参数辨识误差。 2.测试软件版本以及运行结果展示MATLAB2022a版本运行 3.核心程序 ```for i=1:Mc for i=3:n-2Xkp=FX0; % 计算状态的一步预测...

基于UKF无迹卡尔曼滤波的电池Soc估计matlab仿真
1.课题概述 通过UKF无迹卡尔曼滤波对电池的SOC进行估计,并对比电池真实的SOC,输出两者的对比仿真结果。 2.系统仿真结果 3.核心程序与模型版本:MATLAB2022a 0021 4.系统原理简介 电池状态估计,特别是电池的荷电状态(State of Charge, SoC)估计,在电动汽车、混合动力汽车以及其他电池应用领域中至关重要。无迹卡尔曼滤波(Unscented ...

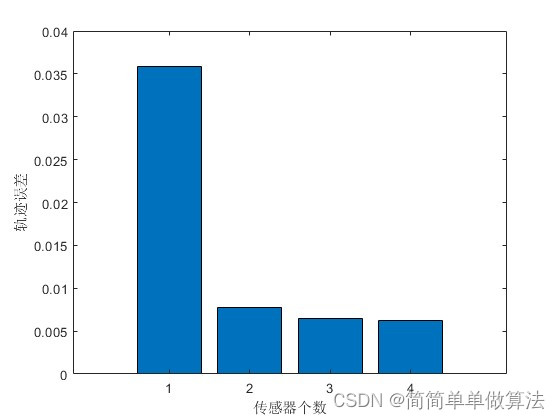
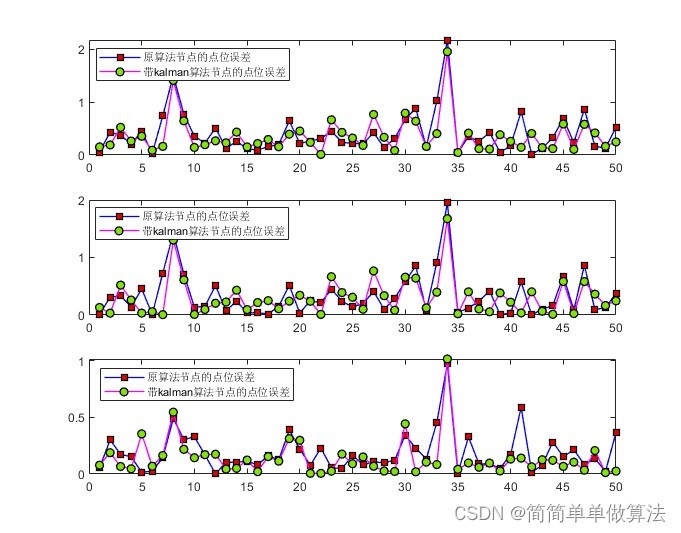
基于EKF扩展卡尔曼滤波的传感器网络目标跟踪matlab仿真
1.算法运行效果图预览 2.算法运行软件版本MATLAB2022a 3.算法理论概述 随着传感器网络技术的不断发展,目标跟踪作为其核心应用之一,在军事、民用等领域中得到了广泛的关注。扩展卡尔曼滤波(EKF)作为一种有效的非线性滤波方法,被广泛应用于传感器网络的目标跟踪中。 传感器网络是由分布在空间中的多个传感器节点组成,这些节点通过无线通信方式相互连接,共同协作完成对环境信息的感...
基于PLE结合卡尔曼滤波的RSSI定位算法matlab仿真
1.算法运行效果图预览 2.算法运行软件版本MATLAB2022a 3.算法理论概述 基于PLE(Power-Law Equalizer)结合卡尔曼滤波的RSSI(Received Signal Strength Indicator)定位算法是一种利用无线信号强度进行位置估计的方法。该方法通过PLE算法对RSSI进行预处理,然后使用卡尔曼滤波器对处理后的数据进行位置和速度的估计。其整体流...
基于扩展卡尔曼滤波EKF的语音信号基音估计算法matlab仿真
1.算法仿真效果matlab2022a仿真结果如下: 2.算法涉及理论知识概要 基音是语音信号的基本频率成分,它决定了语音的音调和声音的音高。在语音信号处理中,基音估计是一个重要的任务,它可以用于语音合成、语音识别、语音增强等应用。扩展卡尔曼滤波(Extended Kalman Filter, EKF)是一种用于非线性系统的滤波方法,它可以用于基音的估计。 在语音信号中,周期性的振...

基于扩展卡尔曼滤波的自适应智能无人车辆行驶matlab仿真,输出三维动态行驶动画
1.算法描述 EKF扩展卡尔曼滤波要解决的是卡尔曼滤波不适用于非线性模型的问题。其和卡尔曼滤波算法结构相同,只是将非线性模型线性化,然后再应用卡尔曼滤波完成状态估计。 扩展卡尔曼滤波的初始化,需要将各个变量进行设置,对于不同的运动模型,状态向量是不一样的。为了保证代码对不同状态向量的兼容性,我们使用Eigen库中非定长的数据结构。初始化扩展卡尔曼滤波器时需要输入一个初始的状态量x_...
基于目标运动模型和观测模型的交互多模算法IMM卡尔曼滤波目标跟踪matlab仿真
1.算法描述 IMM算法的基本思想是用多个不同的运动模型匹配机动目标的不同运动模式,不同模型间的转移概率是–个马尔可夫矩阵,目标的状态估计和模型概率的更新使用卡尔曼滤波。 交互式多模型 IMM(Interacting Multiple Model)控制算法的主体思想是基于贝叶斯理论而提出的模型间的自动识别与切换:在任意跟踪时刻,通过设置对应目标可能模型数量的模型滤波器来进行实时的机动...

本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
MATLAB仿真相关内容
- agv栅格MATLAB仿真
- 优化栅格MATLAB仿真
- 算法地图MATLAB仿真
- 神经网络时间序列MATLAB仿真
- 优化神经网络时间序列MATLAB仿真
- 卷积神经网络算法MATLAB仿真
- 优化卷积神经网络算法MATLAB仿真
- 栅格路径规划MATLAB仿真
- 优化路径规划MATLAB仿真
- 遗传优化神经网络算法MATLAB仿真
- 优化时间序列MATLAB仿真
- 优化网络算法MATLAB仿真
- 优化神经网络MATLAB仿真
- 地图路径规划MATLAB仿真
- ga优化MATLAB仿真
- 卷积MATLAB仿真
- 神经网络算法MATLAB仿真
- 路径规划MATLAB仿真
- 时间序列MATLAB仿真
- 地图MATLAB仿真
- 遗传优化算法MATLAB仿真
- ga MATLAB仿真
- 网络MATLAB仿真
- MATLAB性能仿真
- 搜索优化MATLAB仿真
- MATLAB仿真功率谱
- 机器MATLAB仿真
- 优化机器MATLAB仿真
- 搜索机器调度MATLAB仿真
- 算法MATLAB仿真甘特图
MATLAB更多仿真相关
- 调制信号MATLAB仿真
- MATLAB仿真甘特图
- 调度MATLAB仿真甘特图
- 优化调度MATLAB仿真
- 调度MATLAB仿真
- MATLAB仿真分析
- 调制MATLAB仿真
- 搜索MATLAB仿真
- 车辆MATLAB仿真
- 指纹MATLAB仿真
- 系统MATLAB仿真
- 深度学习MATLAB仿真
- 检测MATLAB仿真
- 遗传优化MATLAB仿真
- 仿真MATLAB
- cnn MATLAB仿真
- 误码率MATLAB仿真
- MATLAB仿真gui
- ofdm MATLAB仿真
- 信道MATLAB仿真
- 模型MATLAB仿真
- 序列MATLAB仿真
- 粒子群MATLAB仿真
- MATLAB误码率仿真
- pso MATLAB仿真
- pso优化MATLAB仿真
- 通信MATLAB仿真
- bp MATLAB仿真
- 深度学习检测MATLAB仿真
- 三维MATLAB仿真
MATLAB您可能感兴趣
大数据开发治理DataWorks
DataWorks基于MaxCompute/Hologres/EMR/CDP等大数据引擎,为数据仓库/数据湖/湖仓一体等解决方案提供统一的全链路大数据开发治理平台。
+关注