
ROS中阶笔记(六):机器人感知—机器语音
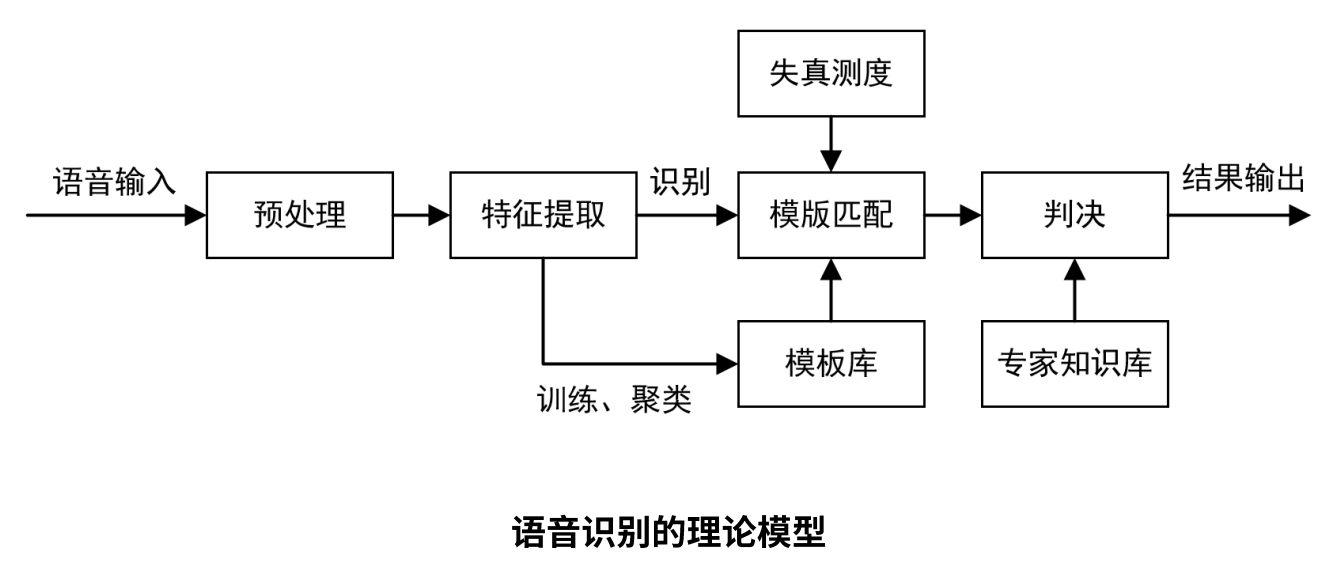
1 语音识别理论2 常用语音功能包pocketsphinx:集成CMU Sphinx和Festival开源项目中的代码,实现语音识别的功能audio-common:提供了文本转语音的功能实现完成"机器人说话"的想法AIML:人工智能标记语音,Artificial Intelligence Markup Language是一种创建自然语音软件代理的XML语言3 科大讯飞SDK登录科大讯飞开放平台的....
ROS中阶笔记(五):机器人感知—机器视觉(上)
1 ROS中的图像数据1.1 二维图像1.1.1 安装安装usb_cam步骤一,检测电脑是安装usb_cam还是应该安装uvc_cam$ lsusb #查看usb摄像头打开网址:http://www.ideasonboard.org/uvc/,查看与自己摄像头匹配的ID号。如果有,就说明你的笔记本摄像头比较好,有他的厂商提供的linux驱动,是uv...

本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
