
07 ROS的TF坐标管理工具
一、TF介绍 TF 即 Transform 转换之意通过坐标变换可以得到一个机器人中不同坐标系之间的关系A坐标系下的位置和姿态可以通过平移和旋转,转化成B坐标系下的位姿订阅TF消息的节点将会缓冲一份一段时间内所有坐标系变换关系的数据 二、使用TF功能包的方式 1. 监听TF变换 Listen 接收、缓存系统发布的所有坐标变换数据,从中查询所需的坐标变换关系 2. 广播...
[ROS基础] --- TF坐标转换
1 TF坐标转换概念tf:TransForm Frame,坐标变换坐标系:ROS 中是通过坐标系统开标定物体的,确切的将是通过右手坐标系来标定的。TF左边转换作用:在 ROS 中用于实现不同坐标系之间的点或向量的转换。说明在ROS中坐标变换最初对应的是tf,不过在 hydro 版本开始, tf 被弃用,迁移到 tf2,后者更为简洁高效,tf2对应的常用功能包有:tf2_geometry_msgs....
ROS学习-写一个tf broadcaster(C++)
本博客主要介绍如果广播坐标框架到tf中。我们将通过本博客以及后续一篇博客来重现tf 介绍教程中的例子。之后,我们再通过后续的教程来实现 tf 更高级的特性。创建一个learning_tf包开始之前,我们需要创建一个新的ros包(参考:ROS学习-创建一个Package包),假设包的名字为learning_tf,依赖于tf、roscpp 、rospy、和turtlesim 等包。 # 切换到自己的....

ROS学习-tf介绍
tf简介一个机器人系统一个时间段通常有多个3D坐标系在变化,如世界全局坐标系,world frame, base frame, gripper frame(手臂/夹子坐标框架),head frame等。tf包能够一次性的跟踪这些所有的框架,并且允许我们询问类似于下述问题:在5秒之前,头坐标框架相对于世界坐标框架在哪里?机器人夹子上的物体相对于基座的位姿。基座框架在地图框架中现在的位姿是什么?tf....
ROS TF 将传感器数据转换为机器人坐标系下
1、变换设置 设计一个传感器在机器人上的场景许多ROS 功能包 通过利用TF2 软件 库 去 发布 机器人的 坐标变换树 在抽象层面上,坐标变换树 定义了 每个 不同的坐标系间的 偏移和旋转。为了更加具体一些,举个例子 例如一个简单的机器人,是一个可移动的小车底盘在顶部安装着一个单线激光测距仪。在这个简单机器人中,定义两个坐标系 : 一个小车底盘的中心(base_link),另一个激光测距仪的.....

【古月21讲】ROS入门系列(4)——参数使用与编程方法、坐标管理系统、tf坐标系广播与监听的编程实现、launch启动文件的使用方法
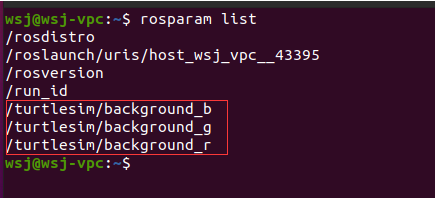
1、参数的使用与编程方法创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs 2.相关参数命令使用rosparam list 列出当前所有参数注意上图红色框图部分,这里可能和ROS入门21讲中的不一样,在代码中相应的调整。rosparam get param_key 显示某个参数值ro....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。

