
ROS仿真支持C++和C语言
ROS仿真支持C++和C语言。 在ROS中,C++是最常用的编程语言之一,它不仅用于编写性能要求高的机器人应用程序,还是ROS核心功能库的主要开发语言。这意味着使用C++可以在ROS中获得最佳的性能和灵活性。C++的执行效率高,适用于需要快速响应和处理大量数据的机器人系统[^1...
强化学习(RL)在机器人领域的应用,尤其是结合ROS(Robot Operating System)和Gazebo(机器人仿真环境)
强化学习(RL)在机器人领域的应用,尤其是结合ROS(Robot Operating System)和Gazebo(机器人仿真环境),是一个非常有趣和具有挑战性的领域。下面是从虚拟训练到实车部署的全流程分析概述: ### 1. 环境设置与仿真 **ROS和Gazebo的集成:** - **ROS(Robot Operating ...
ros_gazebo/turtlebot3 室内仿真导航,提取camera/image和pose位姿真值,并将topic 时间同步对齐,最后制作成kitti 格式的数据集。
(1)ros_gazebo turtlebot3 室内环境导航仿真。参考ubuntu 16.04+ros kinetic + gazebo+ aws-robotics 室内环境导航仿真_May Wang的博客-CSDN博客$ cd catkin_ws $ source develop/setup.bash $ expore TURTLEBOT3_MODEL=waffle_pi $ roslaun....
ubuntu16.04下ROS操作系统学习笔记(五)gazebo物理仿真环境搭建、加载服务端模型数据减少报错
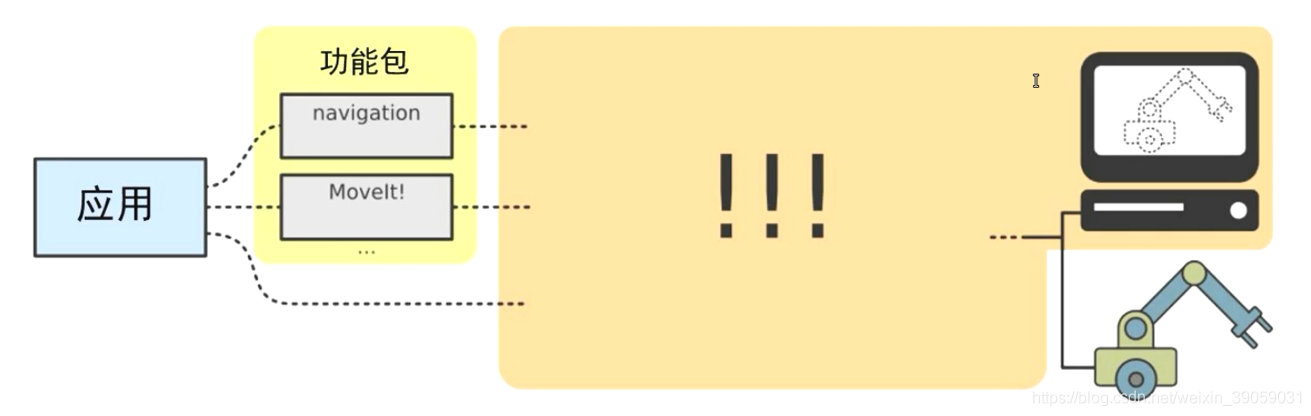
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开发效率。ros_control的定位就是上层应用功能包和底层接口之间的连接的。控制器有一些插件,通过硬件抽象层来对其进行控制。上层应用计算出来的很多数据需要给下层硬件,通过一些接口传达给Controler插件,这些控制器的插件是负责机....
ubuntu16.04下ROS操作系统学习笔记(二)命令工具了解和仿真小海龟
ROS常用命令:命令作用catkin_create_pkg创建功能包rospack获取功能包的信息catkin_make编译工作空间中的功能包rosdep自动安装功能包依赖的其他包roscd功能包目录跳转roscp拷贝功能包中的文件rosed编辑功能包中的文件rosrun运行功能包中的可执行文件roslaunch运行启动文件我们也可以在终端中看一些帮助信息来帮助我们理解这些命令:比如我们使用ro....

ubuntu 16.04+ros kinetic + gazebo+ aws-robotics 室内环境导航仿真
背景:aws-robotic ros-gazebo 仿真在ros2以及ros melodic 中的使用网上讲解较多,本文主要介绍ros kinetic +gazebo9 下turtlebot3 机器人在 aws-robomaker-small-house-world中的导航仿真。一、 gazebo 室内环境Project: aws-robotics/ aws-robomaker-sm....

[ros robot] --- 机器人系统仿真
1 机器人系统仿真概念机器人系统仿真:是通过计算机对实体机器人系统进行模拟的技术,在 ROS 中,仿真实现涉及的内容主要有三:对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现。2 机器人系统仿真相关组件机器人的系统仿真是一种集成实现,主要包含三部分:URDF 用于创建机器人模型Gzebo 用于搭建仿真环境Rviz 图形化的显示机器人各种传感器感知到的环境....
ROS仿真中 读取 turtlebot3 扫描雷达传感器数据 求 前方距离和最短距离(对应方向)
获取传感器数据 以 scan为例启动 waffle 的时候 <arg name="model" default="waffle"/>模型上有 激光扫描器 和 深度相机的地方查看活跃的 topic有深度相机的 图像 rgb相机的图像 激光 /camera/depth/image_raw/camera/rgb/image_raw/scantuttlebot3_worl...

ROS 环境下 安装 turtlebot3 功能包及其仿真包 并测试 —— 全流程(报错及解决)
下载 turtlebot3 功能包turtlebot 太老了可能,仿真只有indigo版本 ,直接用 3吧ros的turtlebot wikiturtlebot官网教程开始安装 turtlebot3 git网址git上下载指定版本git clone -b 版本名 总网址git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turt...

ros仿真 无人机航向控制算法优化
ros仿真 无人机航向控制算法优化当前算法:有输入航向角速度时 就进行扭矩计算 ,当外界干扰时 不进行处理算法优化思想 根据 航向角速度输入 决定机头是否锁定当前航向角度锁定算法 思想, 期望角度 与实际角度进行pid 计算声明新变量 期望航向角度在初始化函数里加入 计算初始的姿态角度 并将初始航向角度设定为 期望航向角度在原来的 控制器参数文件里 增加一个 yaw的控制器 原来只有 ...

本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
