
调用ALIYUN::OTS::SearchIndex在数据表上创建一个多元索引
ALIYUN::OTS::SearchIndex类型用于在数据表上创建一个多元索引。一个数据表可以创建多个多元索引。
ubuntu16.04下ROS操作系统学习笔记(五)gazebo物理仿真环境搭建、加载服务端模型数据减少报错
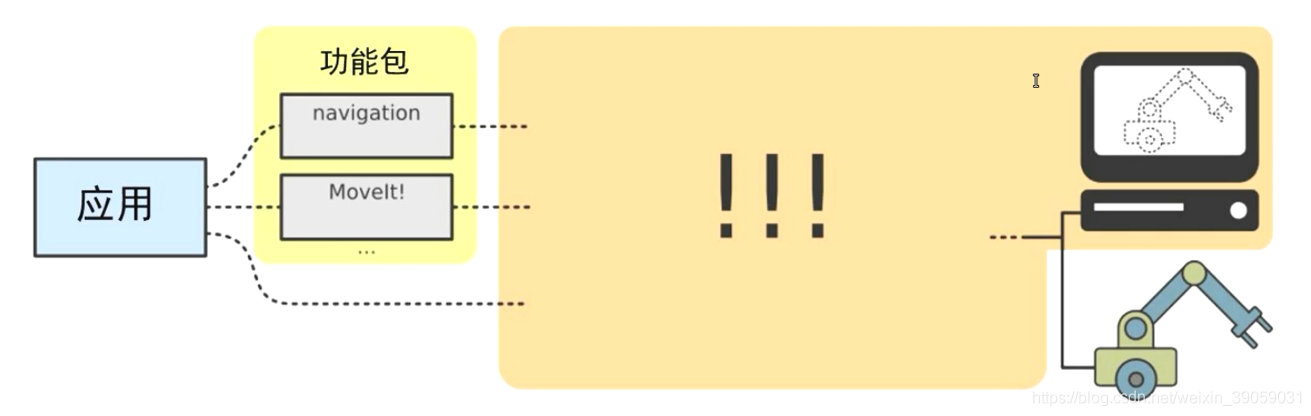
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开发效率。ros_control的定位就是上层应用功能包和底层接口之间的连接的。控制器有一些插件,通过硬件抽象层来对其进行控制。上层应用计算出来的很多数据需要给下层硬件,通过一些接口传达给Controler插件,这些控制器的插件是负责机....
调用ALIYUN::SLS::LogtailConfig配置采集数据时的Logtail参数
ALIYUN::SLS::LogtailConfig类型用于配置采集数据时的Logtail参数。
ROS学习-记录和回放数据
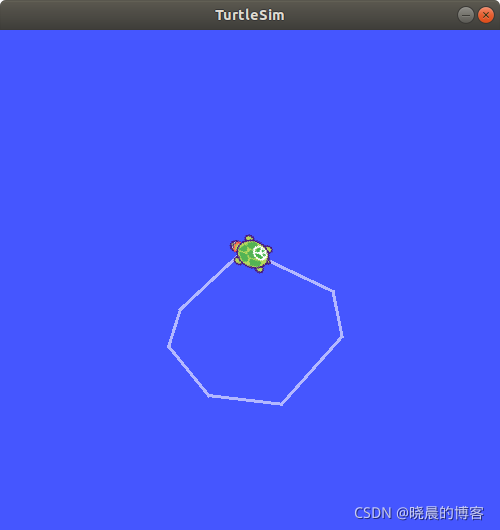
记录数据(创建一个bag文件)从一个运行的ROS系统中记录topic数据,并存储到bag文件中。首先,打开一个Terminal窗口,运行roscore。roscore打开第二个Terminal窗口,运行turtlesim包中的turtlesim_node节点:rosrun turtlesim turtlesim_node打开第三个Terminal窗口,运行turtlesim包中的turtle_t....
ROS仿真中 读取 turtlebot3 扫描雷达传感器数据 求 前方距离和最短距离(对应方向)
获取传感器数据 以 scan为例启动 waffle 的时候 <arg name="model" default="waffle"/>模型上有 激光扫描器 和 深度相机的地方查看活跃的 topic有深度相机的 图像 rgb相机的图像 激光 /camera/depth/image_raw/camera/rgb/image_raw/scantuttlebot3_worl...

3D激光SLAM:ALOAM中KITTI数据集处理--转换成ROS可用数据
前言KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
