
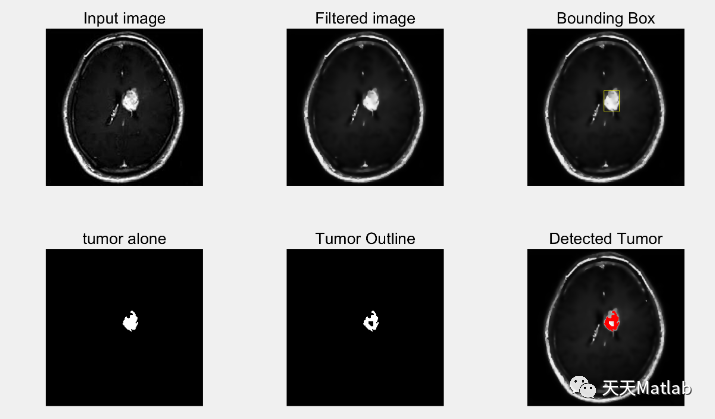
【图像处理】使用各向异性滤波器和分割图像处理从MRI图像检测脑肿瘤(Matlab代码实现)
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab完整代码及仿真定制内容点击智能优化算法 神经网络预测 雷达通信 无线传感器 &...
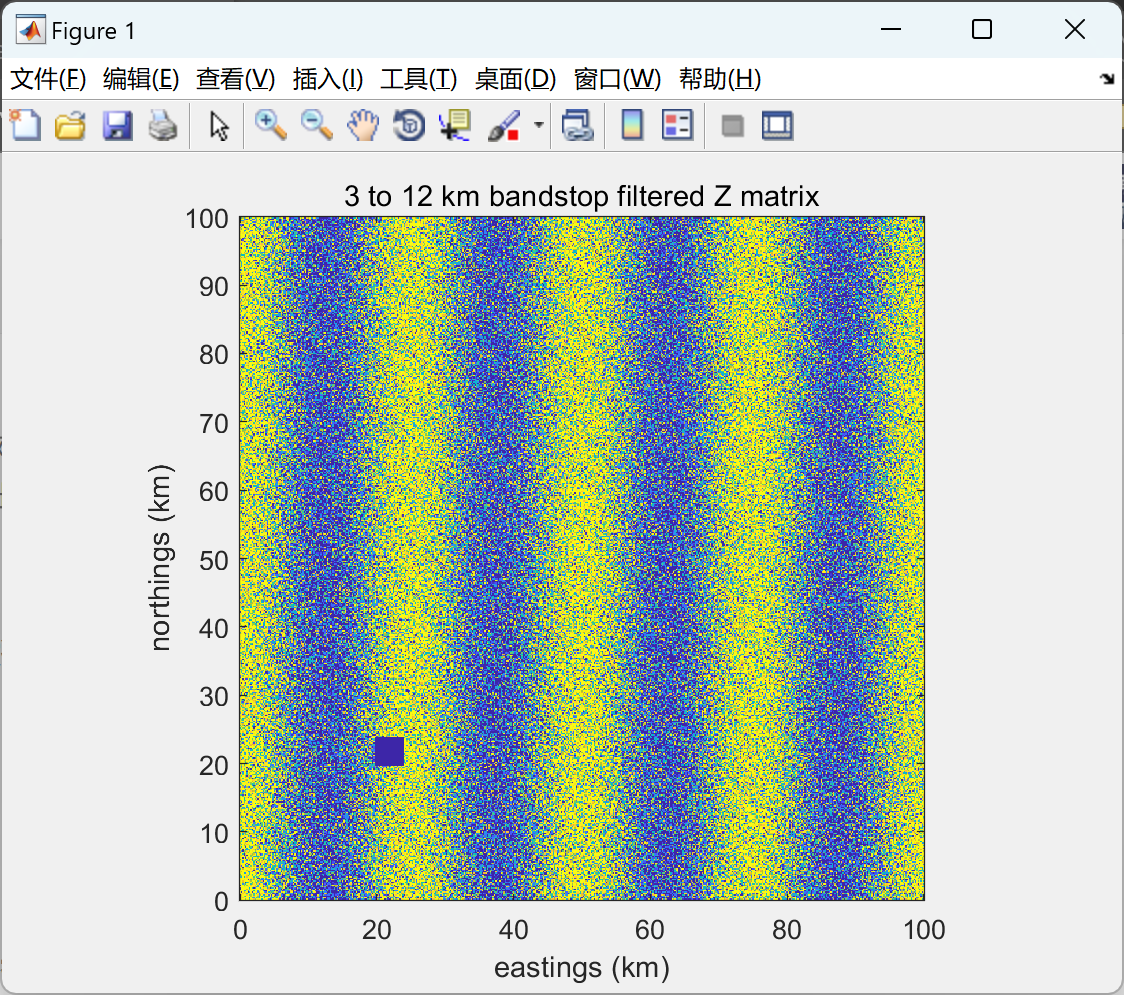
在网格化数据集上轻松执行 2D 高通、低通、带通或带阻滤波器研究(Matlab代码实现)
1 概述在网格化数据集上执行2D高通、低通、带通或带阻滤波器是数字图像处理中常见的操作,可以通过以下步骤轻松实现:1. 确定滤波器类型:首先确定所需的滤波器类型,如高通、低通、带通或带阻。高通滤波器可以提取图像中的细节和边缘信息,低通滤波器可以模糊图像并去除噪声,而带通和带阻滤波器则选择性地保留或去除一定频率范围内的信息。2. 设计滤波器:根据所需的滤波器类型,设计相应的滤波器模板或频率响应。例....
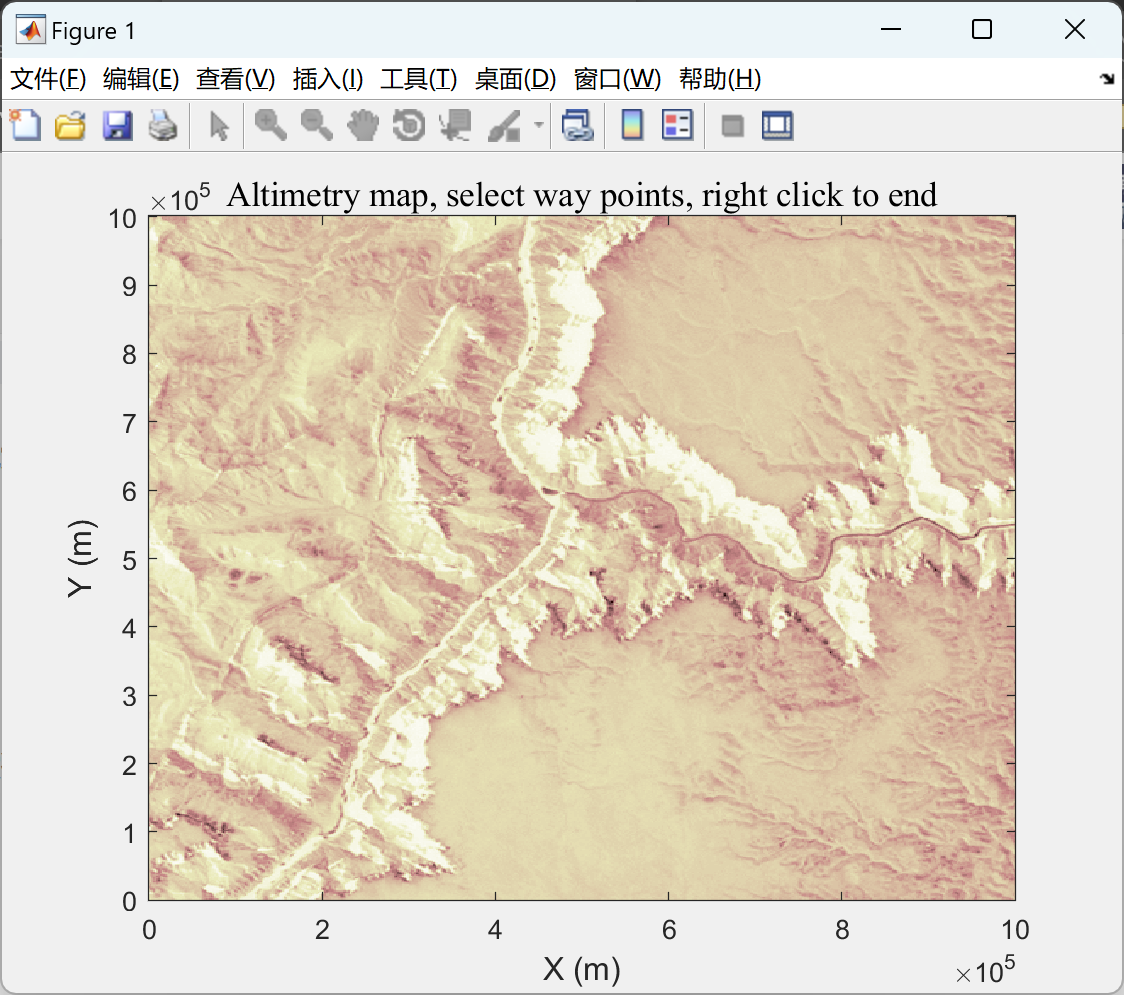
【通过粒子滤波进行地形辅助导航】用于地形辅助导航的粒子滤波器和 PCRB研究(Matlab代码实现)
1 概述粒子滤波(Particle Filter)是一种基于蒙特卡洛采样的非线性滤波方法,常被应用于机器人自主导航和目标跟踪等领域。在地形辅助导航中,粒子滤波器可以用来估计机器人的位置和姿态,并结合地形信息进行导航。粒子滤波器的基本思想是通过一系列粒子(即假设的机器人状态)来近似表示目标状态的后验概率分布。这些粒子在状态空间中进行随机采样,并通过观测数据进行权重更新,从而使得具有较高权重的粒子更....
【使用 DSP 滤波器加速速度和位移】使用信号处理算法过滤加速度数据并将其转换为速度和位移研究(Matlab代码实现)
1 概述对于实时采集的加速度数据,可以应用信号处理算法,如数字滤波和积分运算,将其转换为速度和位移数据。下面是一个简要的概述:1. 数据采集:首先需要进行数据采集,通过传感器获取物体的加速度数据。这可以通过加速度计等传感器来实现,例如使用微电机惯性测量单元(IMU)或加速度传感器。2. 数字滤波:为了去除噪声和不必要的高频分量,可以应用数字滤波技术,如低通滤波器。常见的滤波器类型包括巴特沃斯滤波....

使用贝叶斯滤波器通过运动模型和嘈杂的墙壁传感器定位机器人研究(Matlab代码实现)
1 概述使用贝叶斯滤波器通过运动模型和嘈杂的墙壁传感器定位机器人是一种常见的机器人定位方法。贝叶斯滤波器是一种递归滤波器,通过将先验信息和测量信息进行融合,可以估计机器人的位置和姿态。在这种方法中,运动模型用于预测机器人的下一个位置,考虑机器人的运动方向、速度和加速度等因素。墙壁传感器用于测量机器人与周围墙壁的距离或角度,但由于传感器噪声和不确定性,测量结果可能存在误差。贝叶斯滤波器的基本步骤如....

【MWSG】滤波器增强频谱图,实现强大的鸟声检测(Matlab代码实现)
1 概述在人类的感知系统中,视觉感知和听觉感知是两种主要感知手段,其中,声音是传递信息的重要媒介,也是听觉感知系统的基本要素之一。当前,随着人工智能技术的迅速发展,机器视觉、计算机视觉等方面的技术虽趋于完善,但机器听觉的主要研究对象是语音和声纹,其对复杂声音事件分类和检测等领域的研究仍相对匮乏。目前声音事件分类主要应用于公共安全智能化监控、异常声音检测、城市噪音检测等领域。但当前已有的声音事件分....

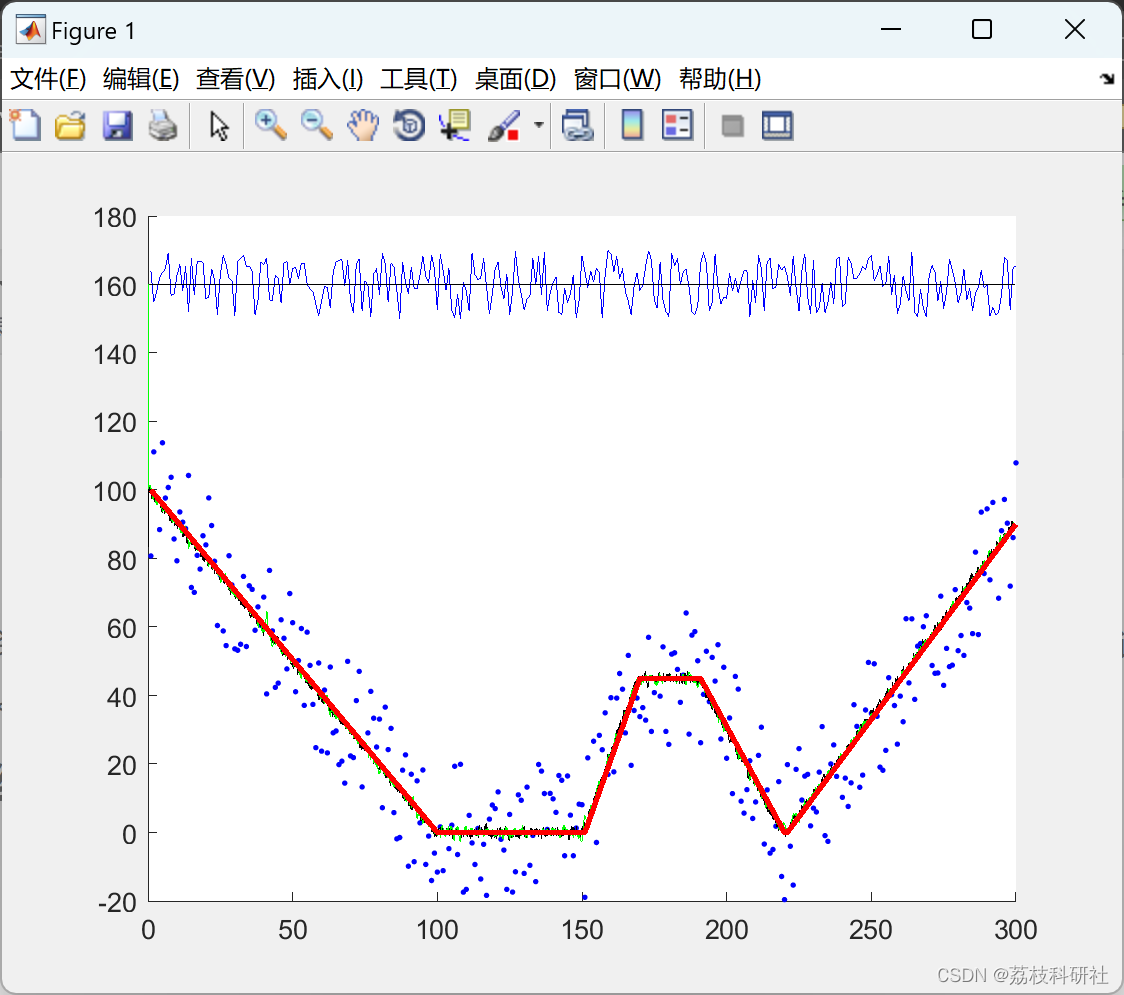
【状态估计】基于线性卡尔曼滤波器和粒子滤波器无人机估计地形高度(Matlab代码实现)
欢迎来到本博客❤️❤️博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️座右铭:行百里者,半于九十。本文目录如下:目录1 概述2 运行结果3 参考文献4 Matlab代码实现1 概述本文模拟了安装在无人机中的距离传感器从地形获得的观测结果,并试图通过嘈杂的观测来估计地面的当前高度。线性卡尔曼滤波和粒子滤波技术都得到了实施和比较。2 运行结果部分代码:% process noise ....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
MATLAB代码实现相关内容
- 卷积研究MATLAB代码实现
- 变异MATLAB代码实现
- 最小二乘MATLAB代码实现
- 图像处理研究MATLAB代码实现
- 图像处理MATLAB代码实现
- 范数研究MATLAB代码实现
- 范数MATLAB代码实现
- admm MATLAB代码实现
- admm研究MATLAB代码实现
- admm应用MATLAB代码实现
- 图像去噪MATLAB代码实现
- fft MATLAB代码实现
- 遗传算法旅行推销员MATLAB代码实现
- 传感器信息系统节能MATLAB代码实现
- 节能MATLAB代码实现
- 传感器节能MATLAB代码实现
- 脑肿瘤MATLAB代码实现
- 优化MATLAB代码实现
- 传感器MATLAB代码实现
- 交互研究MATLAB代码实现
- 阈值研究MATLAB代码实现
- 二进制研究MATLAB代码实现
- 图像研究MATLAB代码实现
- 图像MATLAB代码实现
- 二进制MATLAB代码实现
- 网络仿真MATLAB代码实现
- wsn MATLAB代码实现
- 仿真MATLAB代码实现
- 网络MATLAB代码实现
- 检测MATLAB代码实现
MATLAB更多代码实现相关
- 滤波器检测MATLAB代码实现
- mri MATLAB代码实现
- 分割MATLAB代码实现
- 可见光MATLAB代码实现
- 可见光图像融合MATLAB代码实现
- 图像融合MATLAB代码实现
- 小波变换MATLAB代码实现
- 视觉MATLAB代码实现
- 离散MATLAB代码实现
- 抑制MATLAB代码实现
- 系统MATLAB代码实现
- 模型MATLAB代码实现
- 分布式MATLAB代码实现
- 运行MATLAB代码实现
- 配电网MATLAB代码实现
- 节点MATLAB代码实现
- 储能MATLAB代码实现
- 负荷MATLAB代码实现
- 光伏MATLAB代码实现
- 粒子群MATLAB代码实现
- 应用MATLAB代码实现
- 电动汽车MATLAB代码实现
- 最优MATLAB代码实现
- 计及MATLAB代码实现
- 响应MATLAB代码实现
- 神经网络MATLAB代码实现
- 非线性MATLAB代码实现
- 系统优化MATLAB代码实现
- 模型研究MATLAB代码实现
- 微网MATLAB代码实现
MATLAB您可能感兴趣
大数据开发治理DataWorks
DataWorks基于MaxCompute/Hologres/EMR/CDP等大数据引擎,为数据仓库/数据湖/湖仓一体等解决方案提供统一的全链路大数据开发治理平台。
+关注