
基于Dijkstra、A*和动态规划的移动机器人路径规划(Matlab代码实现)
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab完整代码及仿真定制内容点击智能优化算法 神经网络预测 雷达通信 无线传感器 &...

基于多级适应方法的无人机(UAV)在发动机输出情况下的导航和路径规划(Matlab代码实现)
1 概述文献来源:@article{gu2022multi, title={Multi-level Adaptation for Automatic Landing with Engine Failure under Turbulent Weather}, author={Gu, Haotian and Jafarnejadsani, Hamidreza}, journal={arX...
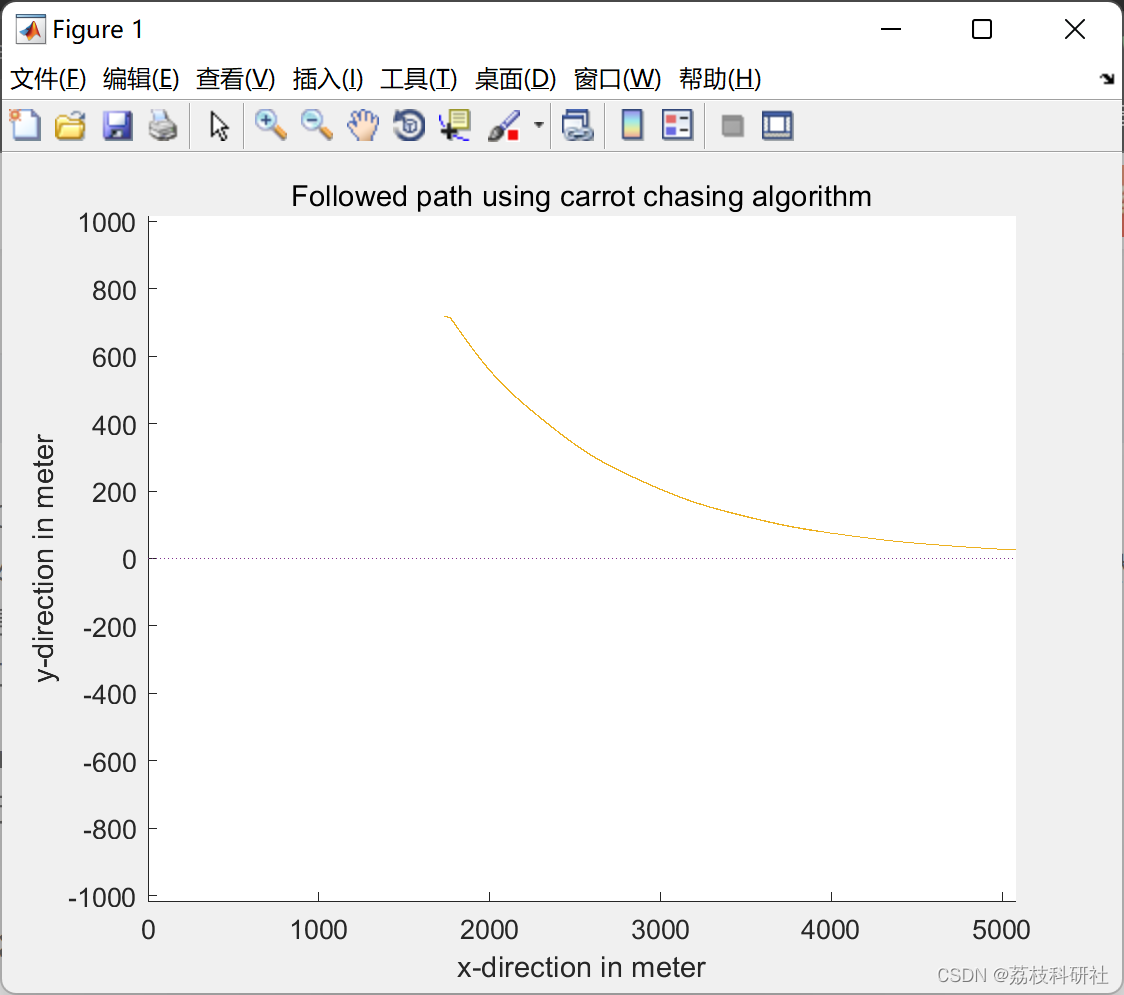
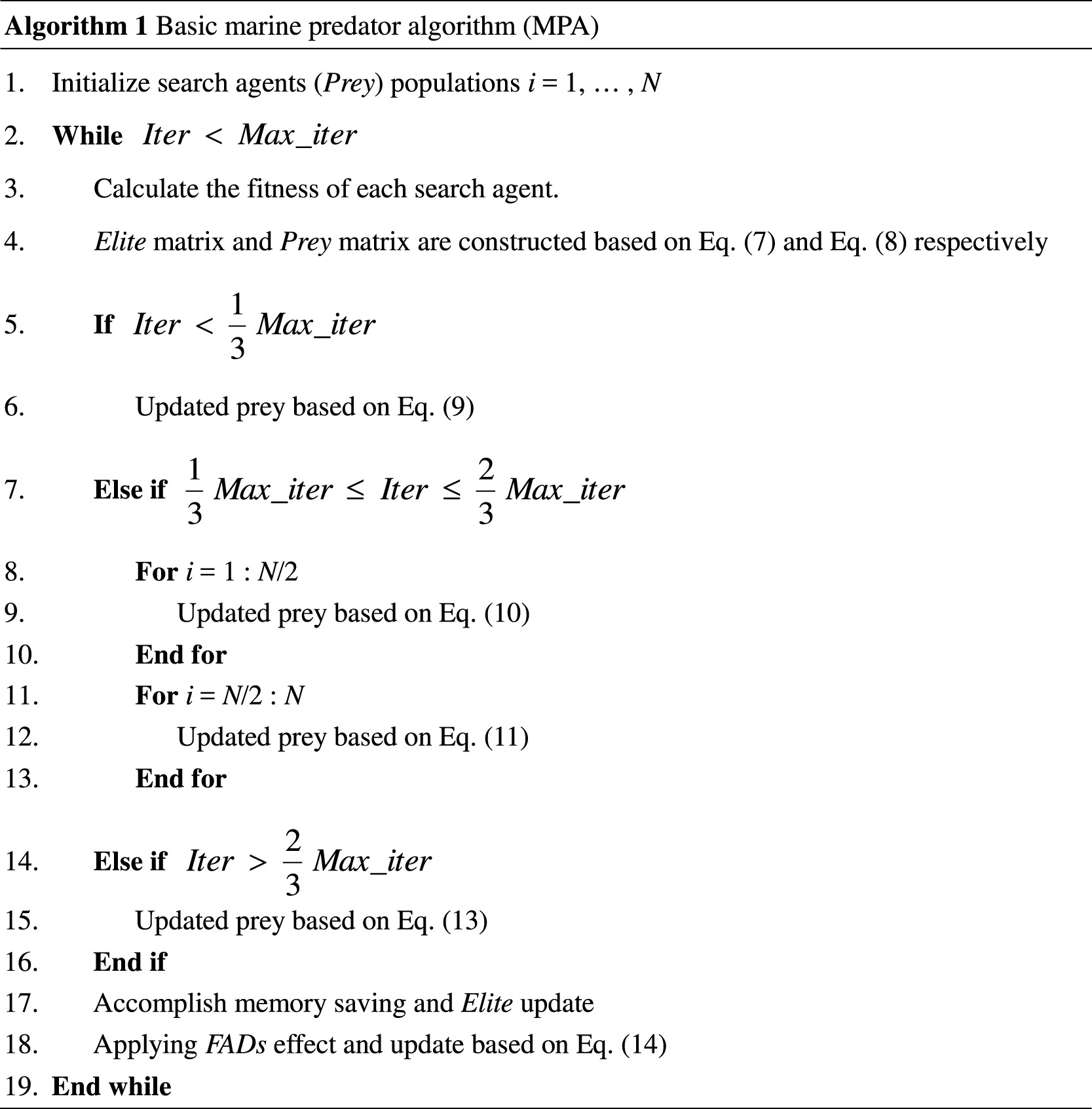
路径规划|多目标海洋捕食者算法(MOMPA)求解最短路径问题(Matlab代码实现)
1 概述本文提出了最近提出的海洋捕食者算法(MPA)的多目标版本,称为多目标海洋捕食者算法(MOMPA)。在此算法中,引入了一个外部归档组件来存储到目前为止找到的非主导帕累托最优解。基于精英选择方法,提出一种顶级捕食者选择机制,从档案中选择有效的解决方案作为顶级捕食者,模拟捕食者的觅食行为。利用CEC2019多模态多目标基准函数对所提算法的性能进行了评价,并与9种最先进的多目标元启发式算法进行了....
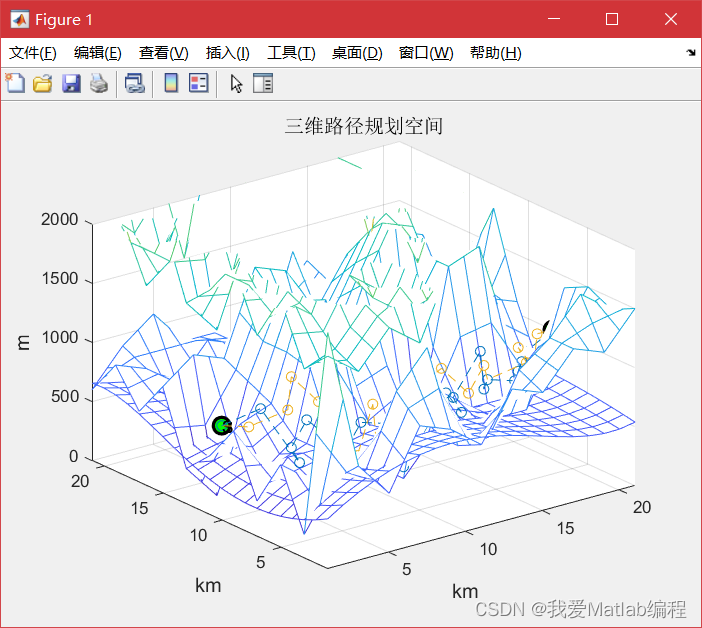
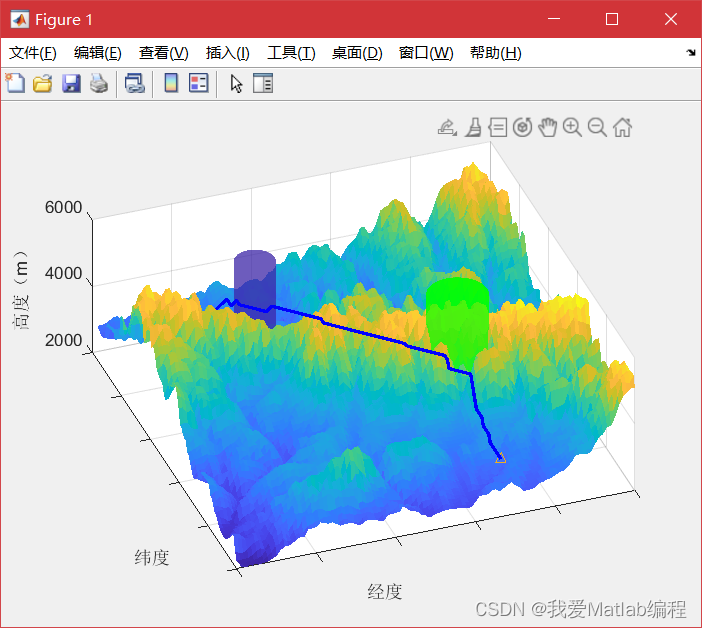
基于蚁群算法的三维路径规划算法以及蚁群算法的优化计算——TSP优化(Matlab代码实现)
1 概述1.1简介当前社会, 很多用户需要在复杂的没有公路的山地地形, 快速、准确的规划出三维路径, 在避过障碍的同时达到某项指标最优。目前常用的路径规划算法, 大多数只能规划二维平面路径;而一般的三维规划算法, 大多运算算法复杂、需要很大的存储空间, 同时无法在宏观全局角度来进行路径规划。本文在已有三维山地地图的基础上, 采用一种改进的蚁群算法来解决上述问题。软件仿真结果显示, 基于改进蚁群算....
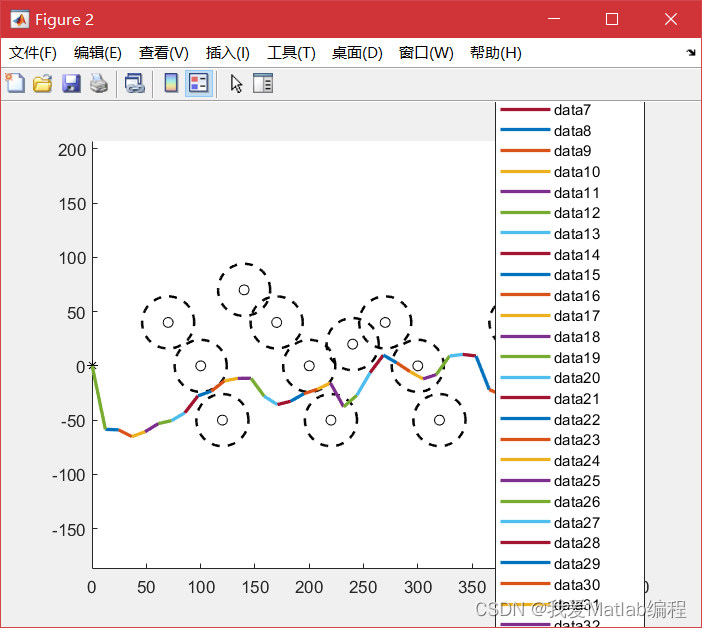
基于人工蜂群算法的新型概率密度模型的无人机路径规划(Matlab代码实现)
1 概述文章提出一种基于人工蜂群算法的非确定性双向规划机制搜索算法。首先针对不同场景,采用两种方法进行环境建模;其次,结合非确定性搜索机制引入双向规划方法,对人工蜂群算法中食物的产生方式做出改进,优化下一个节点的产生结果,再提出一种新的方法对已产生路径进行优化;最后研究了多无人机协同路径规划的两种模型:不同的起点起飞,同时到达 同一终点,或按照指定顺序和时间间隔依次到达同一终点,并给出若干实验仿....
利用Astar算法实现飞行轨迹的三维路径规划(基于Matlab代码实现)
1 概述随着自动化技术的发展,现代航空技术水平有了前所未有的提高,促进了无人机在军事、民用领域的广泛应用。航迹规划技术作为无人机任务规划的关键技术,一直都是无人机领域的一大研究热点。无人机航迹规划是指在满足其运动约束条件的同时,寻找无人机从起始点到目标点符合某种性能指标的最优或次优的可飞轨迹。在现实应用中,由于无人机飞行环境复杂,约束条件多,航迹规划的质量不仅取决算法的优劣还与解决问题的策略相关....
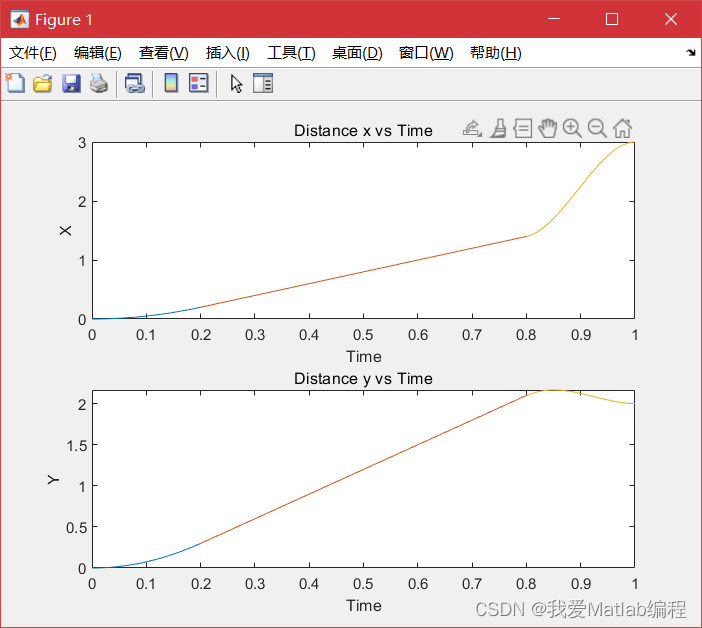
基于RRT算法的最优动力学路径规划(Matlab代码实现)
1 概述RRT是Steven M. LaValle和James J. Kuffner Jr.提出的一种通过随机构建Space Filling Tree实现对非凸高维空间快速搜索的算法。该算法可以很容易的处理包含障碍物和差分运动约束的场景,因而广泛的被应用在各种机器人的运动规划场景中。RRT 的一个弱点是难以在有狭窄通道的环境找到路径。因为狭窄通道面积小,被碰到的概率低,找到路径需要的时间要看运气....
基于蚁群算法的时延Petri网(ACOTPN)路径规划算法(Matlab代码实现)
1 概述本文主要介绍了一种基于蚁群算法的时延Petri网(ACOTPN)路径规划算法,它是根据蚁群算法的原理和时延库所Petri网的路径规划原理合成的一种新算法。当ACOTPN运行时,蚂蚁在网中的变迁行走并在变迁与变迁之间留下信息素,在遍历同时不仅更新变迁序列,而且会更新网标识,反过来通过判断网标识是否处于终止标识来决定蚂蚁遍历是否结束。1.1研究背景道路交通作为当今社会生产生活的重要一环,保障....

基于智能优化算法实现的机械臂避障路径规划(Matlab代码实现)
1 概述针对目前空间机械臂避障路径规划算法计算量大难以达到在线实时规划的缺点,对空间机械臂的在线实时避障路径规划问题进行了研究和探讨。采用规则体的包络对障碍物进行建模,并借助C空间法的思想,把障碍物和机械臂映射到两个相互垂直的平面内,将机械臂工作空间的三维问题转化为二维问题,并结合二岔树逆向寻优的方法进行路径搜索,从而大大减少了计算量,达到了在线实时规划的要求。最后在空间机器人仿真系统上对其进行....
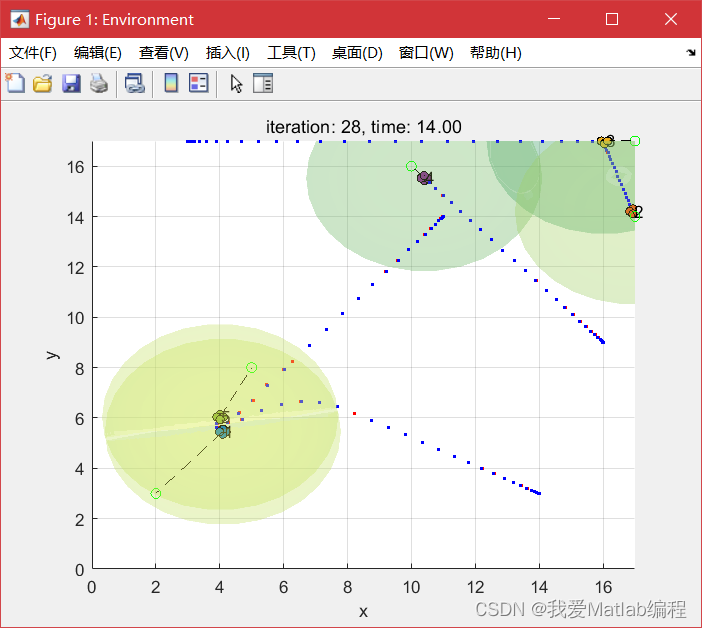
复杂环境下多移动机器人路径规划研究(Matlab代码实现)
1 概述针对多移动机器人运动协调中的动态安全避碰问题,在分析速度障碍法原理的基础上,设计用于机器人之间相互避让的互动速度法则,并通过制定机器人的碰撞时间、碰撞距离因子对构型障碍的大小进行实时调整,把运动障碍物、动力学约束下的多步可达窗口、目标点都映射到一种速度变化空间当中,使多机器人的动态避碰问题转化为一种最优化问题,并构造了新的优化评价函数;设计了基于改进速度障碍法的机器人动态避碰规划算法。仿....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
MATLAB代码实现相关内容
- 卷积研究MATLAB代码实现
- 变异MATLAB代码实现
- 最小二乘MATLAB代码实现
- 图像处理研究MATLAB代码实现
- 图像处理MATLAB代码实现
- 范数研究MATLAB代码实现
- 范数MATLAB代码实现
- admm MATLAB代码实现
- admm研究MATLAB代码实现
- admm应用MATLAB代码实现
- 图像去噪MATLAB代码实现
- fft MATLAB代码实现
- 遗传算法旅行推销员MATLAB代码实现
- 传感器信息系统节能MATLAB代码实现
- 节能MATLAB代码实现
- 传感器节能MATLAB代码实现
- 脑肿瘤MATLAB代码实现
- 优化MATLAB代码实现
- 传感器MATLAB代码实现
- 交互研究MATLAB代码实现
- 阈值研究MATLAB代码实现
- 二进制研究MATLAB代码实现
- 图像研究MATLAB代码实现
- 图像MATLAB代码实现
- 二进制MATLAB代码实现
- 网络仿真MATLAB代码实现
- wsn MATLAB代码实现
- 仿真MATLAB代码实现
- 网络MATLAB代码实现
- 检测MATLAB代码实现
MATLAB更多代码实现相关
- 滤波器检测MATLAB代码实现
- mri MATLAB代码实现
- 分割MATLAB代码实现
- 滤波器MATLAB代码实现
- 可见光MATLAB代码实现
- 可见光图像融合MATLAB代码实现
- 图像融合MATLAB代码实现
- 小波变换MATLAB代码实现
- 视觉MATLAB代码实现
- 离散MATLAB代码实现
- 系统MATLAB代码实现
- 模型MATLAB代码实现
- 分布式MATLAB代码实现
- 运行MATLAB代码实现
- 配电网MATLAB代码实现
- 节点MATLAB代码实现
- 储能MATLAB代码实现
- 负荷MATLAB代码实现
- 光伏MATLAB代码实现
- 粒子群MATLAB代码实现
- 应用MATLAB代码实现
- 电动汽车MATLAB代码实现
- 最优MATLAB代码实现
- 计及MATLAB代码实现
- 响应MATLAB代码实现
- 神经网络MATLAB代码实现
- 非线性MATLAB代码实现
- 系统优化MATLAB代码实现
- 模型研究MATLAB代码实现
- 微网MATLAB代码实现
MATLAB您可能感兴趣
DataWorks
DataWorks基于MaxCompute/Hologres/EMR/CDP等大数据引擎,为数据仓库/数据湖/湖仓一体等解决方案提供统一的全链路大数据开发治理平台。作为阿里巴巴数据中台的建设者,DataWorks从2009年起不断沉淀阿里巴巴大数据建设方法论,同时与数万名政务/金融/零售/互联网/能源/制造等客户携手,助力产业数字化升级。
+关注