
基于DWA优化算法的机器人路径规划matlab仿真
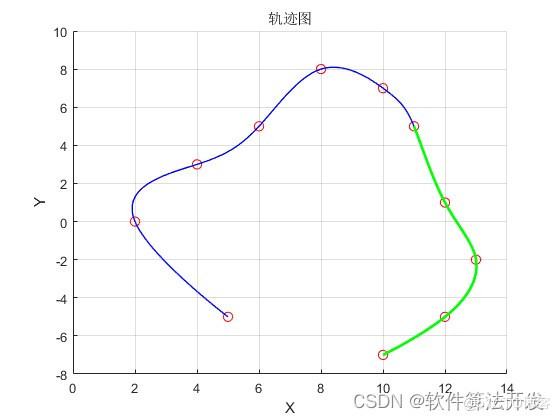
1.程序功能描述基于DWA优化算法的机器人路径规划matlab仿真。给出路径规划和路径预测输出。 2.测试软件版本以及运行结果展示MATLAB2022A版本运行 3.核心程序 for i=1:length(x) scatter(x(i),y(i),50,'red'); %路径规划给出的点 hold on end fx = 0; fy &#...
基于QLearning强化学习的较大规模栅格地图机器人路径规划matlab仿真
1.算法仿真效果matlab2022a仿真结果如下(完整代码运行后无水印): 机器人行驶动作序列: Action_seqs = '下下下下右右下下下下下下下下下下下下右右上上上上上上上上上上上右右右下右下下下下下下右右上上上上右右右右右下右下下下下下右下右右上上上上上上上上上上上' 仿真操作步骤可参考程序配套的操作...
基于QLearning强化学习的机器人避障和路径规划matlab仿真
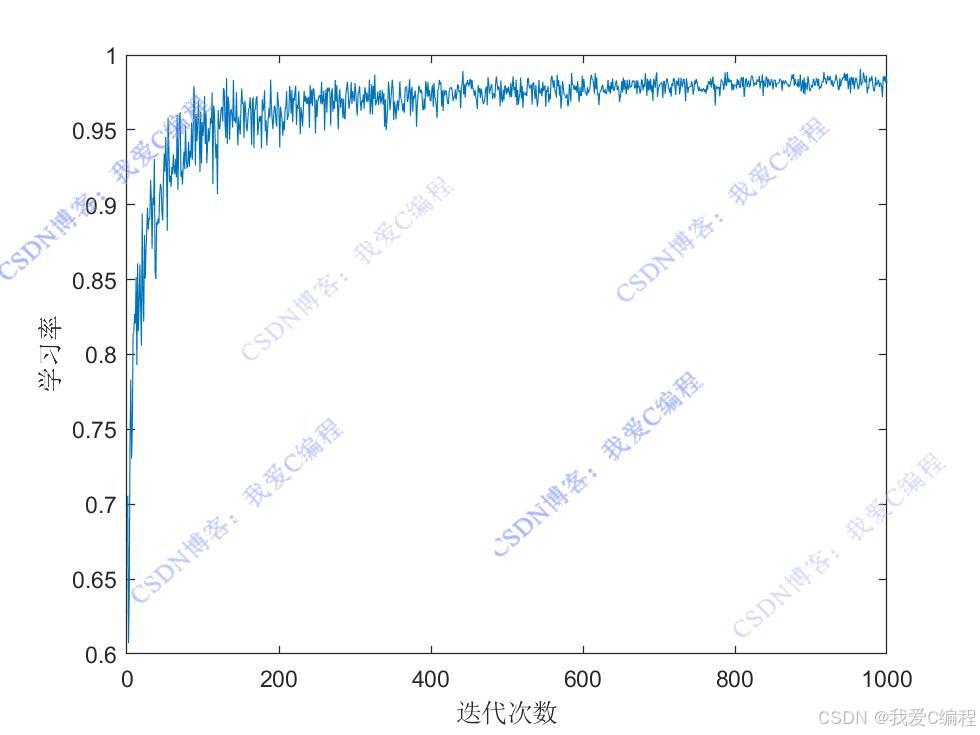
1.算法仿真效果matlab2022a仿真结果如下(完整代码运行后无水印): 2.算法涉及理论知识概要 强化学习是一种机器学习方法,它使智能体能够在与环境交互的过程中学习如何采取行动以最大化累积奖励。Q-Learning是一种无模型的强化学习算法,特别适合于离散动作空间的问题。在机器人避障和路径规划中...
基于模糊神经网络的移动机器人路径规划matlab仿真
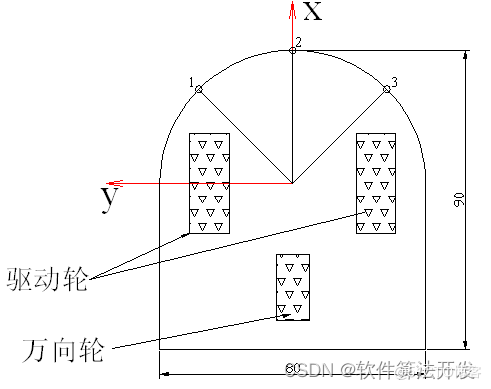
1.程序功能描述基于模糊神经网络的移动机器人路径规划 1.环境地图中的障碍物为静态、未知障碍物,可以随机设置。(一般设置5~7个,为计算简便设置成规则性状的障碍物) 2.机器人的行进方向为X轴的正方向,X轴逆时针旋转90°即为Y轴。两驱动轮之间的距离为50cm,驱动轮的直径为30cm。机器人的最大运动速度设为0....
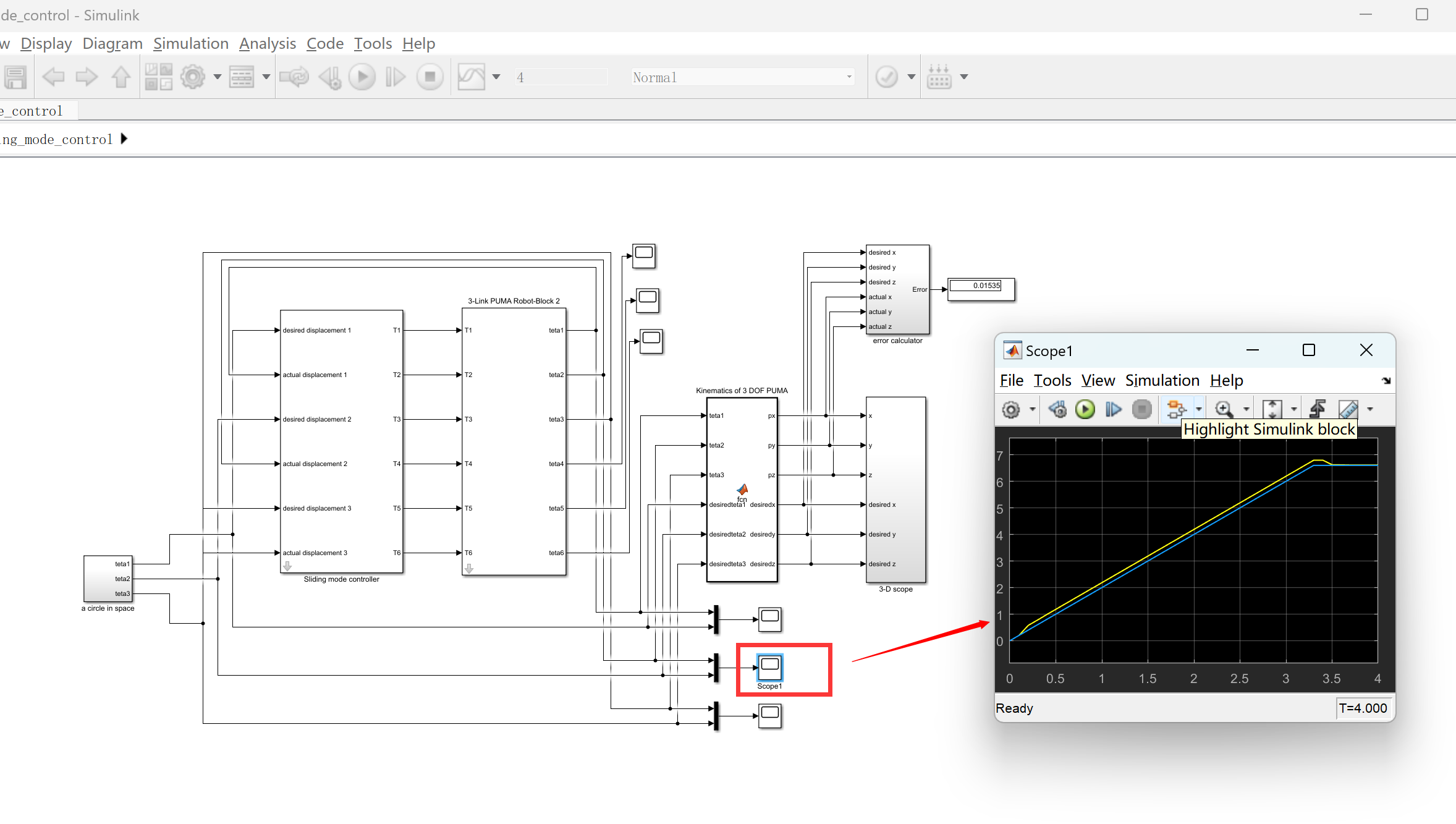
三自由度PUMA机器人非线性控制研究(Matlab代码、Simulink仿真实现)
1 概述针对三自由度PUMA560机器人的控制问题,可以使用三种不同的非线性控制算法:计算扭矩控制、滑模控制和反步控制。下面简要介绍这些算法的基本原理:1. 计算扭矩控制(Computed Torque Control):计算扭矩控制是一种基于模型的控制方法,通过反馈线性化将非线性系统线性化,然后设计一个线性控制器来跟踪期望轨迹。控制器根据系统模型计算所需的关节扭矩,以达到期望的位置、速度和加速....
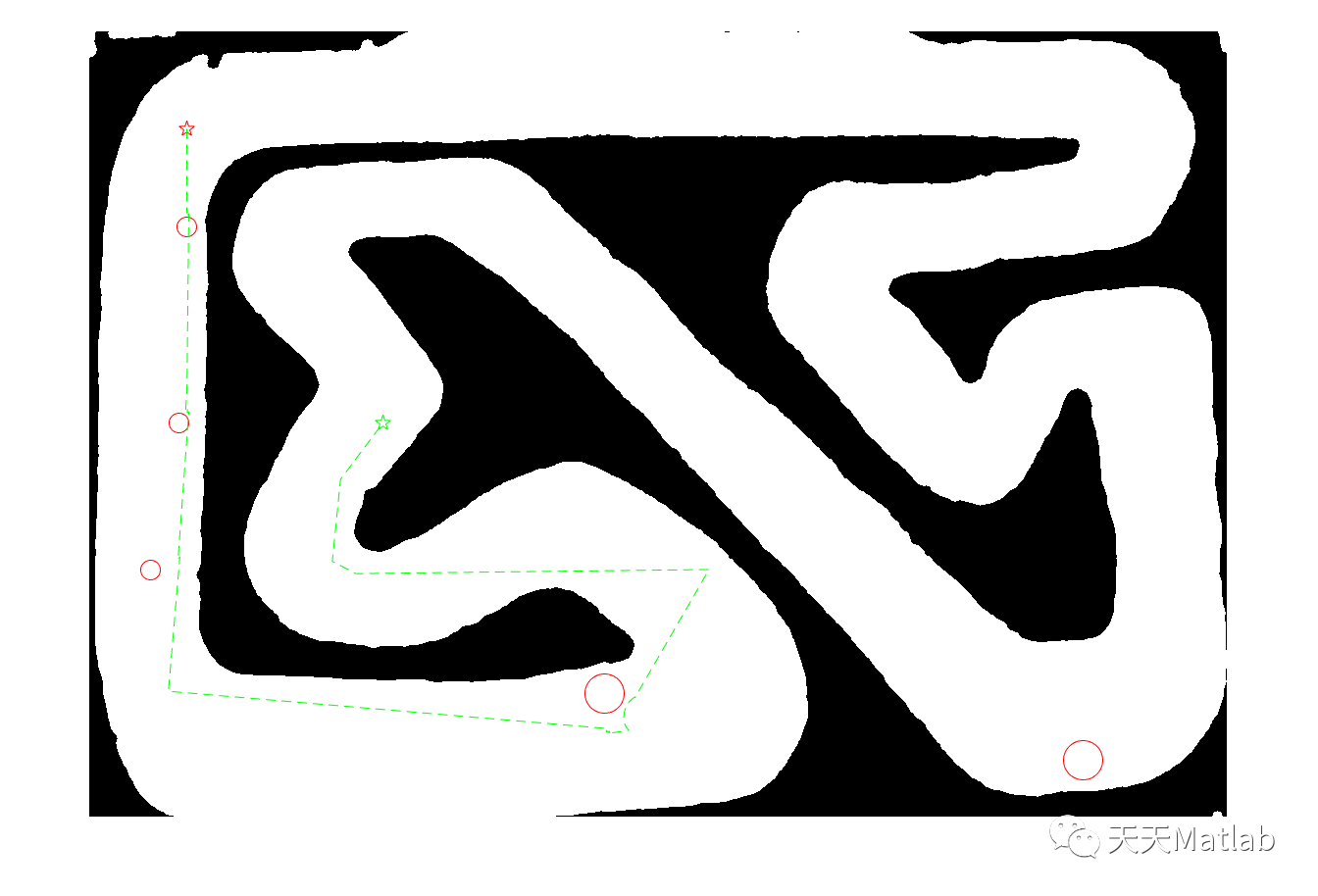
【路径规划】基于RRT+APF实现机器人二值地图动态避障算法附matlab仿真
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab仿真内容点击智能优化算法 神经网络预测 雷达通信 无线传感器 &...
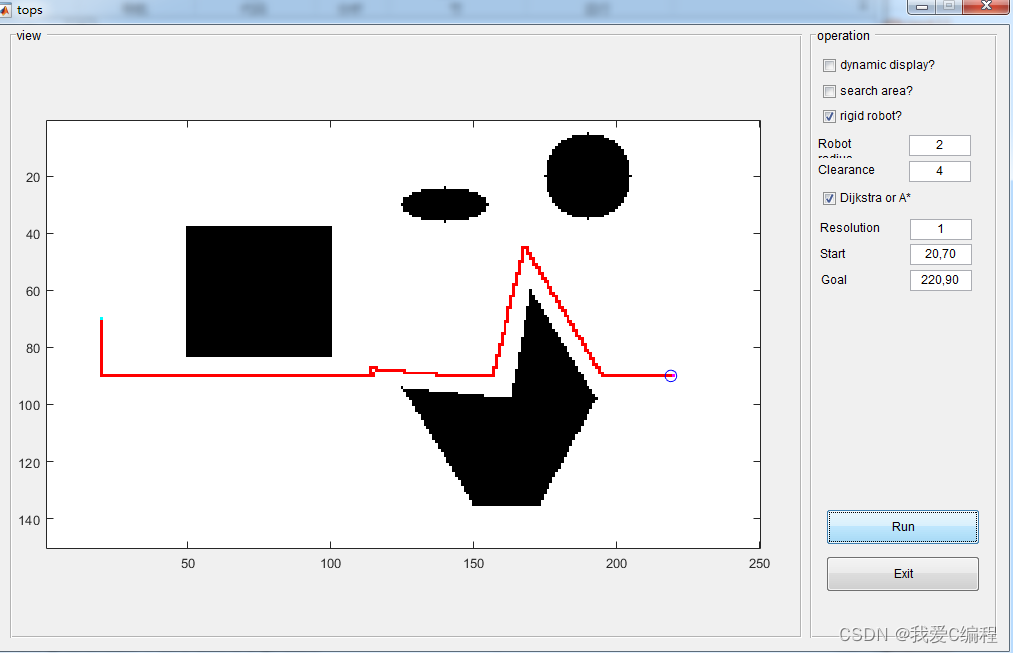
m分别使用Dijkstra算法和Astar算法进行刚体机器人最短路径搜索和避障算法的matlab仿真,带GUI界面
1.算法描述 Dijkstra(迪杰斯特拉)算法是典型的最短路径路由算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止(BFS、prime算法都有类似思想)。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。 算法描述(1)S为已经找到的从v出发的最短路径的终点集合,它的初始状态为空集,将源点加入S中。 ...
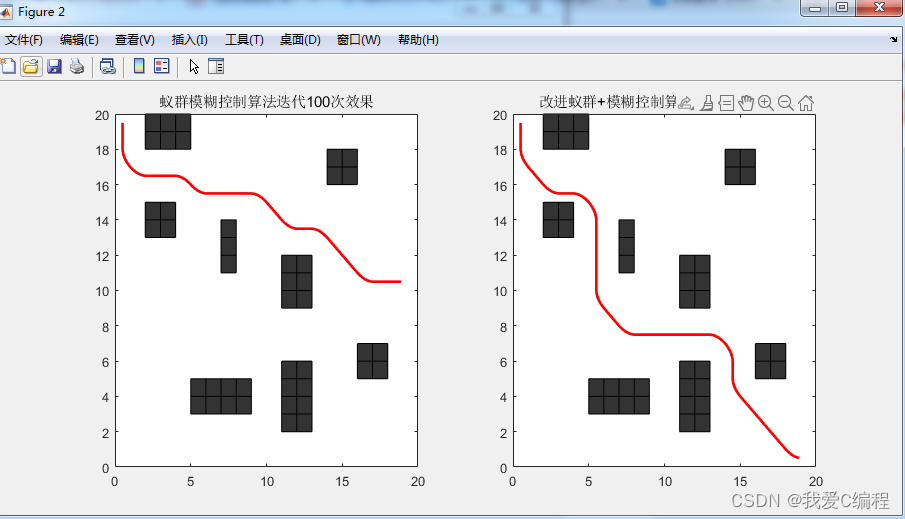
m基于蚁群优化模糊控制的机器人路线规划和避障算法matlab仿真
1.算法描述 蚁群算法是受到对真实蚂蚁群觅食行为研究的启发而提出。生物学研究表明:一群相互协作的蚂蚁能够找到食物和巢穴之间的最短路径,而单只蚂蚁则不能。生物学家经过大量细致观察研究发现,蚂蚁个体之间的行为是相互作用相互影响的。蚂蚁在运动过程中,能够在它所经过的路径上留下一种称之为信息素的物质,而此物质恰恰是蚂蚁个体之间信息传递交流的载体。蚂蚁在运动时能够感知这种物质,并且习惯于追踪此物质爬行...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
MATLAB仿真相关内容
- 梯度MATLAB仿真
- 温度MATLAB仿真
- 图像MATLAB仿真gui
- MATLAB仿真gui
- 三维MATLAB仿真
- 扩频通信系统MATLAB仿真
- MATLAB误码率仿真参数设置
- 图传通信系统MATLAB仿真设置
- qam MATLAB误码率仿真
- qam通信系统MATLAB仿真
- 扩频turbo译码MATLAB仿真
- MATLAB仿真参数
- MATLAB仿真设置
- 扩频MATLAB仿真
- qam MATLAB仿真
- 译码MATLAB误码率仿真
- 通信系统MATLAB仿真
- MATLAB误码率仿真
- 偏微分方程MATLAB仿真
- 扩散MATLAB仿真
- 策略MATLAB仿真
- 控制器MATLAB仿真
- 图像配准MATLAB仿真
- 控制系统MATLAB仿真
- svm数据分类MATLAB仿真
- 数据分类MATLAB仿真
- svm MATLAB仿真
- 包围盒MATLAB仿真
- woa MATLAB仿真
- 优化时间序列MATLAB仿真
MATLAB更多仿真相关
- 优化网络算法MATLAB仿真
- woa优化MATLAB仿真
- cnn MATLAB仿真
- 时间序列MATLAB仿真
- 布局MATLAB仿真
- 遗传优化算法MATLAB仿真
- 网络MATLAB仿真
- 定位系统MATLAB仿真
- 无源MATLAB仿真
- qpsk通信系统MATLAB仿真
- 系统MATLAB仿真
- 深度学习MATLAB仿真
- 检测MATLAB仿真
- 遗传优化MATLAB仿真
- 仿真MATLAB
- ga MATLAB仿真
- 误码率MATLAB仿真
- ga优化MATLAB仿真
- ofdm MATLAB仿真
- 信道MATLAB仿真
- 序列MATLAB仿真
- 模型MATLAB仿真
- 粒子群MATLAB仿真
- pso MATLAB仿真
- pso优化MATLAB仿真
- bp MATLAB仿真
- 神经网络算法MATLAB仿真
- MATLAB性能仿真
- 通信MATLAB仿真
- 深度学习检测MATLAB仿真
大数据开发治理DataWorks
DataWorks基于MaxCompute/Hologres/EMR/CDP等大数据引擎,为数据仓库/数据湖/湖仓一体等解决方案提供统一的全链路大数据开发治理平台。
+关注