
STM32Cubemx PWM驱动SG90舵机
一、SG90相关介绍 名 称:9克舵机 180度 尺 寸:23mmX12.2mmX29mm重 量:9克 扭 矩:1.5kg/cm工 作 电 压: 4.2-6V温 度 范 围:0℃--55℃...

STM32—PWM开发SG90舵机
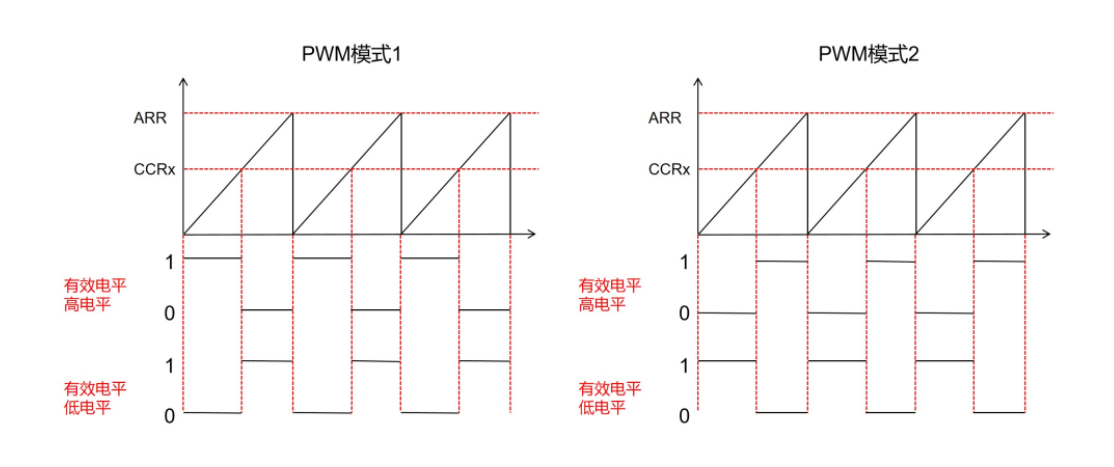
PWM介绍 STM32F103C8T6 PWM资源: 高级定时器(TIM1):7路 通用定时器(TIM2~TIM4):各4路 PWM输出模式: PWM模式1:在向上计数时,一旦 CNT < CCRx 时输出为有效电平,否则为无效电平; 在向 下计数时,一旦 CNT > CCRx 时输出为无效电平,否则为有效电平。 ...
STM32控制SG90舵机原理及代码
一.SG90舵机原理 舵机的运用还是比较广泛的,那么舵机工作原理是什么呢,一般来说我们给舵机一个信号他就能工作了,那么这个信号是什么,以及如何产生的呢。这里我们需要给舵机一个PWM信号,频率是50HZ,即周期是20ms(产品手册上这样说的。)。在这个条件下不同的占空比就是不同的信号。不同的信号就能控制舵机转动角度。注意:舵机只有在改变信号时才会转动,一直维持一种信号的情况舵机是不会转动。...
STM32外设系列—sg90(舵机)
文章作者:二土电子 期待大家一起学习交流! 一、sg90简介 首先介绍说一下什么是舵机。舵机是一种位置(角度)伺服的驱动器。适用于一些需要角度不断变化的,可以保持的控制系统。sg90就是舵机的一种。 舵机的工作原理比较简单。舵机内部有一个基准电压,单片机产生的PWM信号通过信号线进入舵机,与舵机内部的基准电压作比较,获得电压差输出。电压差的正负输出到电机驱动芯片上,从而决定...

STM32F103C8T6(HAL库)驱动舵机
1、简介常见的舵机分为360°和180°两种,本次对180°舵机进行驱动,舵机驱动需要通过PWM信号进行驱动。本文通过定时器中的PWM信号设定使得SG90舵机进行不同角度的转动。2、PWM信号和舵机角度关系对于舵机的驱动,需要20ms的脉冲,高电平时间在0.5ms-2.5ms区间即可控制舵机在0-180°角度进行转动。常见角度对应关系如下所示:3、Cubemax初始化配置如下:3.1基础配置首先....

基于STM32F1-C8T6无人机(二)——舵机/电调/空心杯电机/飞控/机架/subs接收机/充电器和电池(给出链接和思考)
一、关于电机的选择文章推荐:空心杯电机学习笔记视频推荐:空心杯电机型号大盘点,原来有这么多赶紧收藏二、关于飞控参考文章:STM32F103C8T6开发板+GY521加速度计模块制作有刷四轴飞控,改造空心杯小四轴主要看这篇三、看懂原理图的接线四、电机和桨叶主要是根据创意点子的机架而确定的,这里选用720的空心杯电机和55mm的桨叶五、机架选用意创电子参考文章:微型四轴DIY机架,轻巧稳固耐摔,通用....

STM32小项目总结3(内含:1.PWM控制LED达到呼吸灯+2.PWM驱动舵机+3.PWM驱动直流电机+4.笔记)
1.PWM控制LED达到呼吸灯首先需要注意的是呼吸灯的效果是通过改变亮灭亮灭的速度完成(余晖效应)。思路:1.RCC开启GPIOA和TIM2+2.初始化时基单元+选择内部时钟+3.初始化输出比较单元+4.初始化GPIO+5.开启计数器+6.自定义函数(推荐使用PWM_SetCompare1命名)补充:1.使用的库函数是RCC_APB2Per....2.初始化时基单元使用的是TIM_TimBase....

STM32:PWM驱动舵机
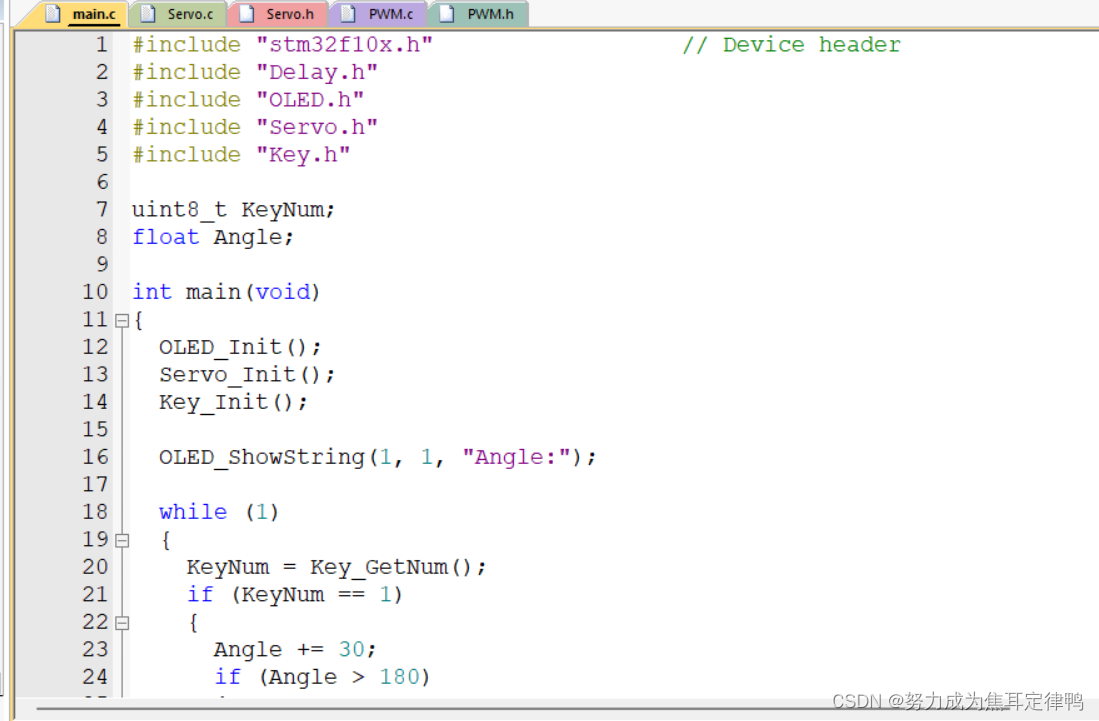
1.主函数(main.c)代码部分:#include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h" #include "Servo.h" #include "Key.h" uint8_t KeyNum; float Angle; int main(void) { O...
STM32:PWM驱动舵机(内含:1.接线原理图/实物图+2.代码部分+3.补充知识部分)
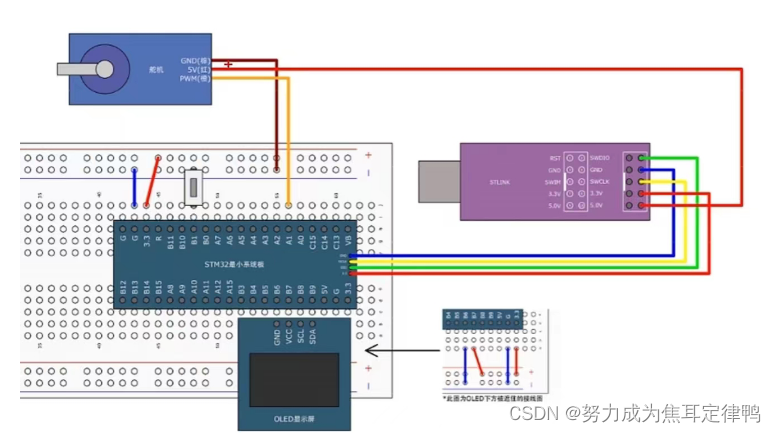
1.接线原理图:注:红线接5V,不是3.3V(电压小,带不动)实物图:PWM驱动舵机:按下按键,舵机输出轴角度变化,OLED显示该角度。2.代码部分如下:主函数代码部分:#include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h" #include "Servo.h" #include "Key.h" u....
STM32:PWM硬件部分知识点讲解(内含:1.PWM简介+2.PWM波形简介(重点)+参数计算+输出比较模式/通道+3.PWM输出控制舵机+直流电机介绍)
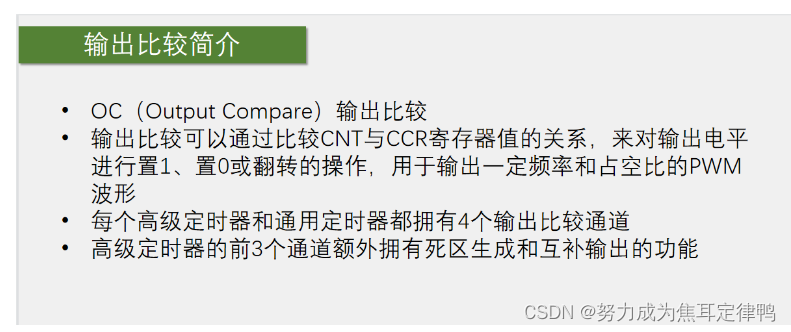
输出比较功能很重要!主要是输出PWM波形。PWM常用于驱动电机,如智能车,机器人等。1.输出比较简介:CC:输入捕获/输出比较的单元。R:寄存器。CCR:捕获比较寄存器。(输入捕获/输出比较共用)。CNT计数自增,CCR是我们给定的值。当CNT>CCR,<CCR,=CCR时,输出就会对应置1,置0,置1,置0。从而输出一个电平不断跳变的PWM波形。以下为STM32如何产生PWM波形。....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
STM32舵机相关内容
IoT
物联网软硬件开发者一站式基地
+关注