
Open3d系列 | 2. Open3d实现点云数据增强
1. 刚体变换介绍点云平移假设原始坐标P0为(x0,y0,z0),经过平移变化后变成P坐标(x,y,z),那么这个过程可以看成是P0向量经过了一个平移矩阵T的作用,变成了P向量。数学公式为:P = P0 + T点云旋转点云旋转通常有四种方式来表达欧拉角、旋转矩阵、旋转向量、四元数(搜索关键词:三维旋转变化、刚体运动)1)欧拉角欧拉角定义最为直观,即点云围绕XYZ三个轴分别进行旋转,对应的旋转角度....

Open3d系列 | 1. Open3d实现点云数据读写、点云配准、点云法向量计算
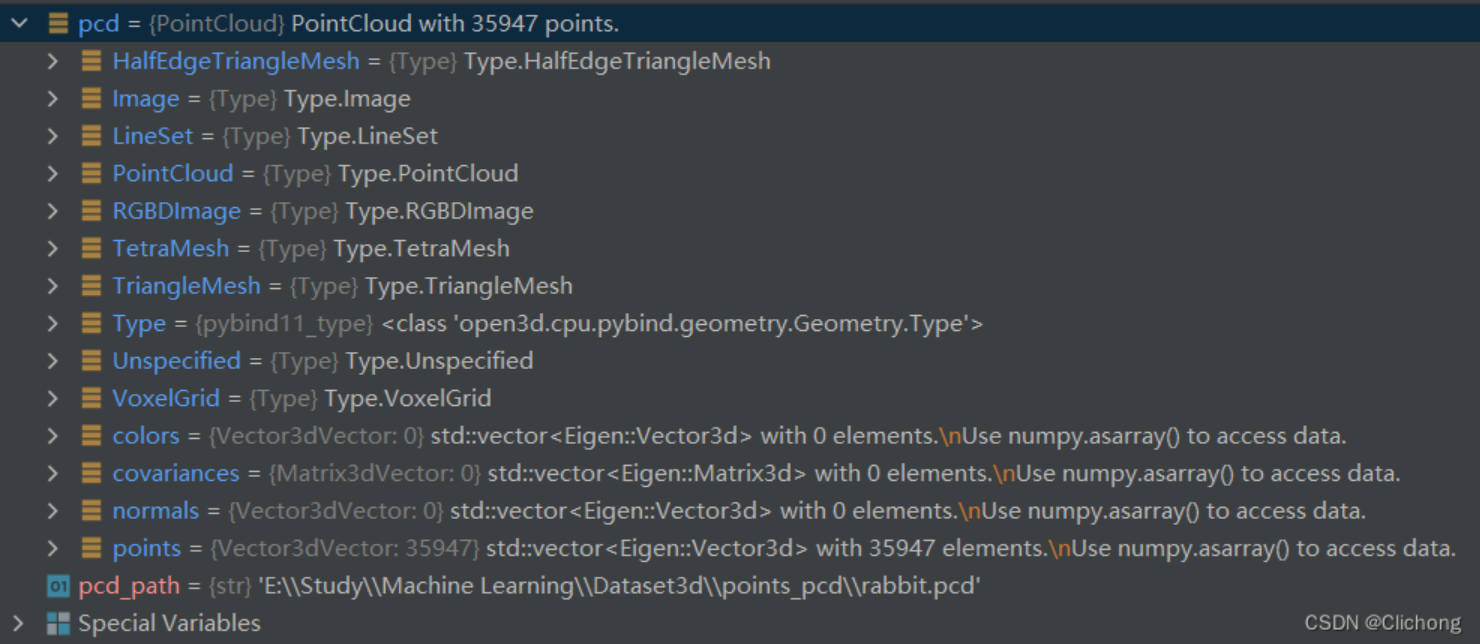
1. 点云格式介绍常见点云存储方式有pcd、ply、txt、bin文件,下面分别对其进行介绍。1.1 pcd文件pcd点云格式是pcl库种常常使用的点云文件格式。一个pcd文件中通常由两部分组成:分别是文件说明和点云数据。 文件说明由11行组成,如下所示。.PCD v0.7 - Point Cloud Data file format #点云文件说明 VERSION 0.7 #版本说明 FIEL....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
