
【ROS速成】半小时入门机器人ROS系统简明教程之可视化系统(三)
4.可视化 ROS系统中有两个极其重要的可视化工具:RQT(Robot Qt Graphics User Interface)和RVIZ(Robot Visualization Tool)。其中RVIZ是一个3D可视化工具,主要用于显示传感器信息,导航地图等信息;RQT则是一个用于创建和管理ROS图形界面的工具,以便开发者实时查看和调试ROS系统。 ...

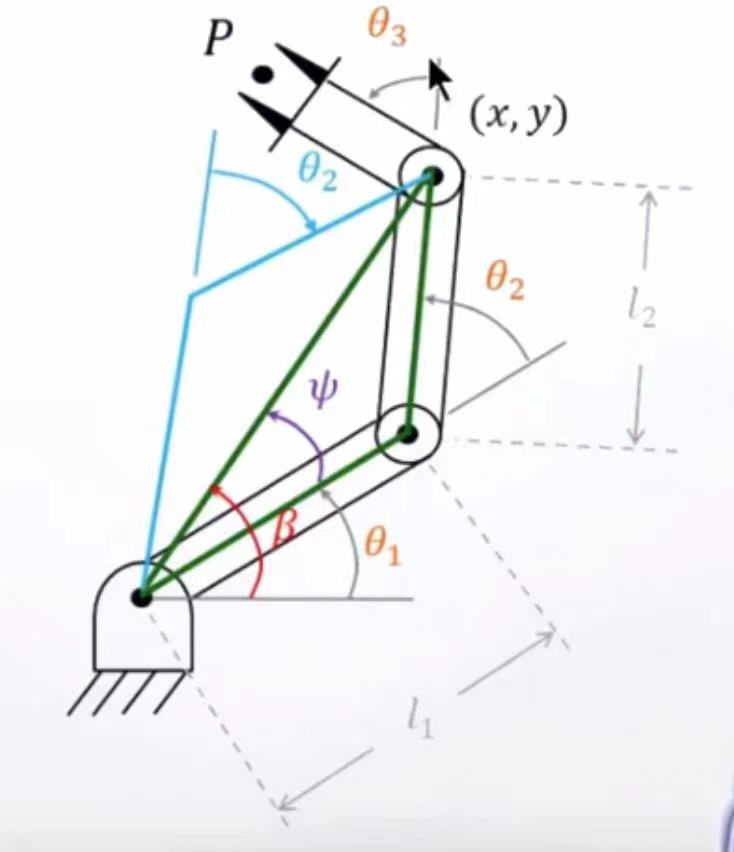
实例10:四足机器人运动学逆解可视化与实践
实例10: 四足机器人运动学逆解单腿可视化 实验目的 了解逆运动学的有无解、有无多解情况。 了解运动学逆解的求解。 熟悉逆运动学中求解的几何法和代数法。 熟悉单腿舵机的简单校准。 掌握可视化逆向运动学计算结果的方法。 实验要求 拼装一条mini pupper的腿部。 运行程序,可视化观察运动学逆解的多解情况和求解方法。 对单腿舵机进行简单校准。 观察运动学逆解的硬...
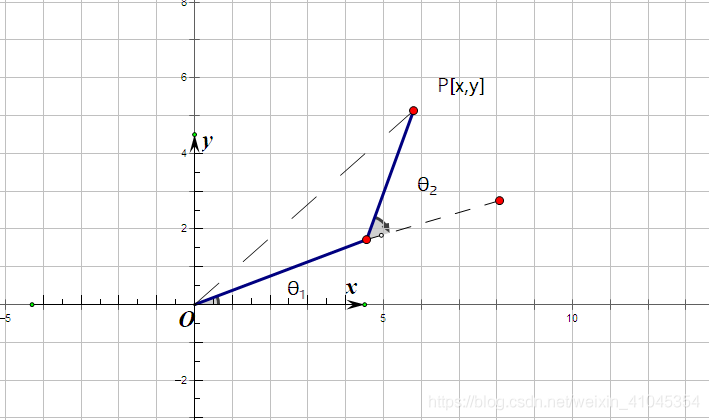
实例9:四足机器人运动学正解平面RR单腿可视化
实例9:四足机器人正向运动学单腿可视化 实验目的 通过动手实践,搭建mini pupper四足机器人的腿部,掌握机器人单腿结构。 通过理论学习,熟悉几何法、旋转矩阵法在运动学正解(FK)中的用处。 通过编程实践,熟悉可视化简化机器人单腿的方法。 实验要求 通过Python编程,在简化的mini pupper平面二连杆模型内,让用户输入关节角,根据关节角及关节的基本信息,计算出每...
机器人流程自动化RPA现在要用可视化写这个窗口流程,但是我不熟悉,该怎么操作呢?
机器人流程自动化RPA现在要用可视化写这个窗口流程,但是我不熟悉,该怎么操作呢?
可视化样例三:参数面板
样例:结合参数面板为流程设定入参样例场景说明借助可视化功能编排流程,使用参数面板功能为流程设定入参具体步骤参考视频教程:步骤1:使用参数面板注意:以下是可视化样例二的进阶部分注意1.首先在最上方的功能栏处,选择“视图”,确保“参数面板”选项被勾选,然后在左下方点击“参数面板”选项卡,在弹出的参数面板...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。

