
【操作系统】进程控制与进程通信
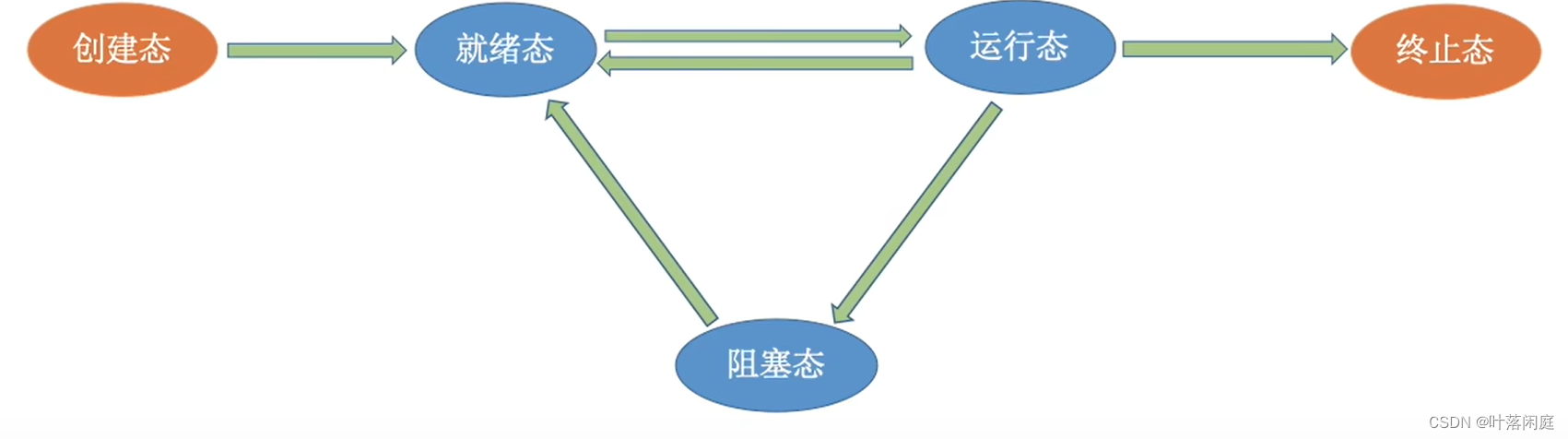
一、进程控制 1.1 什么是进程控制 进程控制的主要功能是对系统中的所有进程实施有效的管理,它具有创建新进程、撤销己有进程、实现进程状态转换等功能。 简化理解:反正进程控制就是要实现进程状态转换 ...
【操作系统】进程的控制和通信
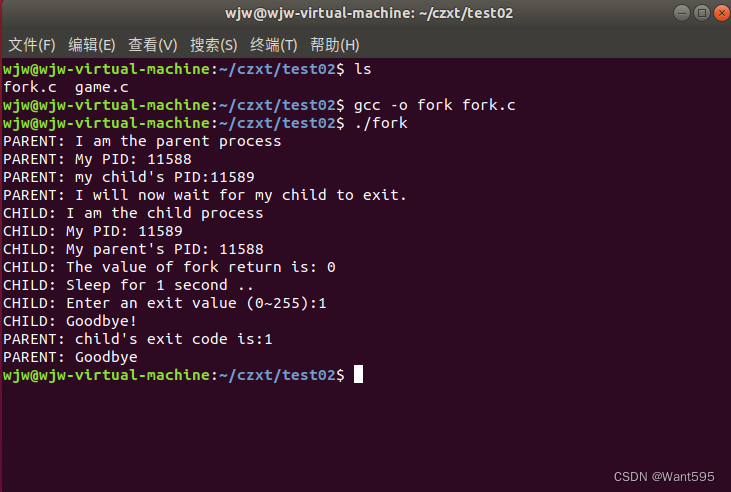
一. 实验目的(1)加深对进程概念的理解,进一步认识并发执行的实质。(2)掌握Linux 操作系统中进程的创建和终止操作。(3)理解进程间通信的概念和方法。(4)掌握常用的Linux 进程间通信的方法。二. 实验内容(1)编写一个C程序,并使用系统调用fork()创建一个子进程。要求如下:① 在子进程中分别输出当前进程为子进程的提示、当前进程的PID 和父进程的PID、根据用户输入确定当前进程的....
操作系统:进程的控制和通信(Windows2000)
进程的控制和通信(Windows2000)一、实验目的通过对Windows 2000编程,进一步熟悉操作系统的基本概念,并能较好地理解Windows 2000的结构。通过创建进程,观察进程的运行和终止程序以及调试操作,进一步熟悉操作系统的进程概念,理解Windows 2000进程的生命周期。二、实验要求与内容、过程与结果参照例2-2,编写一个程序,利用进程句柄来获得当前运行进程的优先级。#inc....

操作系统(2.6)--进程通信
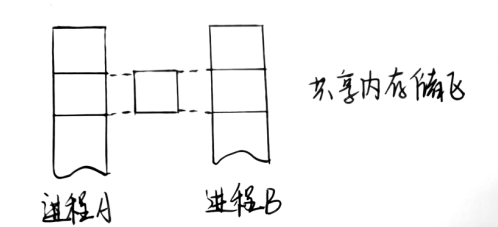
进程通信是指进程之间的信息交换。在进程之间要传送大量数据时,应当利用OS提供的高级通信工具,该工具最主要的特点是:(1)使用方便。OS隐藏了实现进程通信的具体细节,向用户提供了一组用于实现高级通信的命令(原语),用户可方便地直接利用它实现进程之间的通信。(2)高效地传送大量数据。用户可直接利用高级通信命令(原语)高效地传送大量的数据。一、进程通信的流程高级通信机制可归纳为四大类:共享存储器系统、....
计算机操作系统学习笔记(7)——进程通信
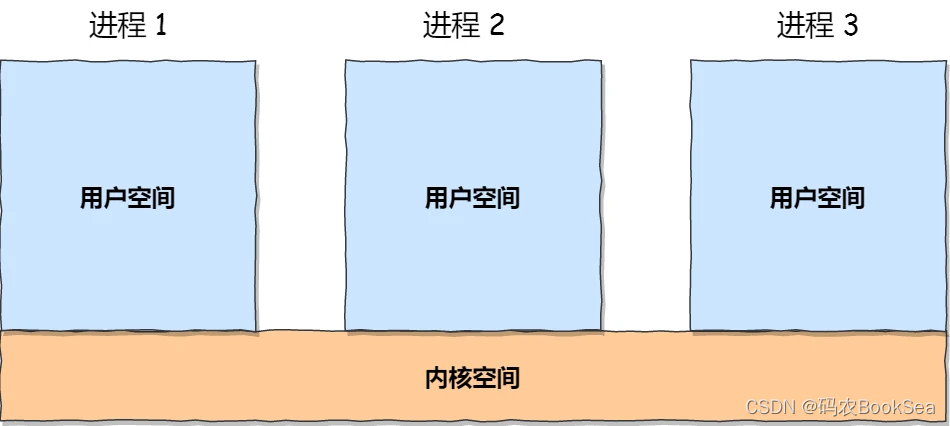
一、进程通信每个进程的⽤户地址空间都是独⽴的,⼀般⽽⾔是不能互相访问的,但内核空间是每个进程都共享的,所以进程之间要通信必须通过内核。信号什么是信号呢?我们可以通过 kill -l 命令,查看所有的信号:linux 的 kill 命令是向进程发送信号,kill 不是杀死的意思,-9 表示无条件退出,但由进程自行决定是否退出,这就是为什么 kill -9 终止不了系统进程和守护进程的原因。运⾏在 ....
ubuntu16.04下ROS操作系统学习笔记(三 / 二)ROS基础-ROS通信编程(下)
我们接下来看一下怎么实现一个服务端,实现服务器的编程:我们在这个功能包下面的src文件夹下面创建一个server.cpp文件:一个服务器的实现也需要分成四个步骤:初始化ROS节点;创建Server实例;循环等待服务请求,进入回调函数;在回调函数中完成服务功能的处理,并反馈应答数据。其代码与之前的比较类似。再回调函数里面,由于之前是将数据分成了两个部分,所以这个也是做两个部分,一个是request....
ubuntu16.04下ROS操作系统学习笔记(三 / 二)ROS基础-ROS通信编程(上)
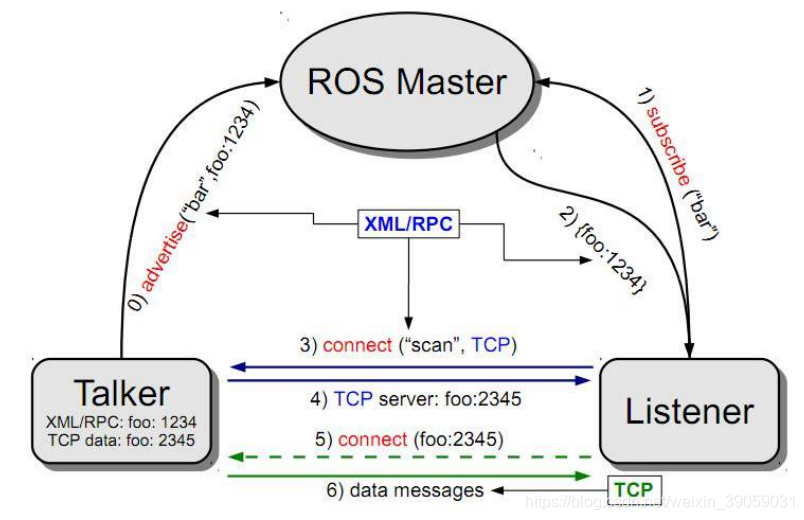
1.话题编程首先我们要有一个发布话题的Talker,还要有一个订阅话题的Listener,然后就是负责管理整个系统的ROS Master。话题编程的流程主要是以下四个步骤:创建发布者创建订阅者添加编译选项运行可执行程序上面的前两步是编程实现的,第三步是通过编译的方式生成可执行文件。最后一步就是去运行一下这个可执行的程序。我们之前创建的功能包learning_communication里面是没有代....
ubuntu16.04下ROS操作系统学习笔记(三 / 三)ROS基础-实现分布式通信
ROS是分布式的节点,这样的话我们就可以将程序运行上的节点放到大型机器上面,分担机器人运行的压力。接下来我们来看一下怎么实现分布式通讯,怎么在多机上运行统一的程序。ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。那么我们如何来实现分布式多机通讯呢:设置IP地址,确保底层链路的联通,假设我们有两台机器,机器A,和机器B,我们首先要保证两台计算机的底层数据通讯是没有问题的。1、ifco....

计算机操作系统实验三 进程间的通信
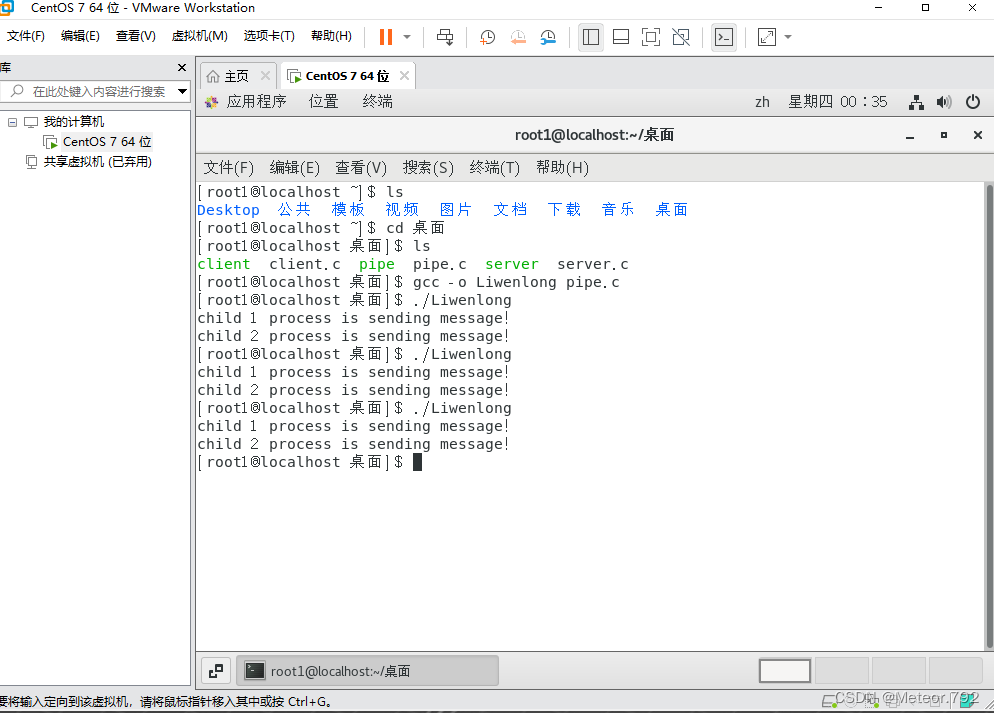
一、实验目的1、了解什么是管道2、熟悉UNIX/LINUX支持的管道通信方式3、了解什么是消息4、熟悉消息传送的机理二、实验内容1.编写程序实现进程的管道通信。用系统调用pipe( )建立一管道,二个子进程P1和P2分别向管道各写一句话: Child 1 is sending a message! Child 2 is sending a me....
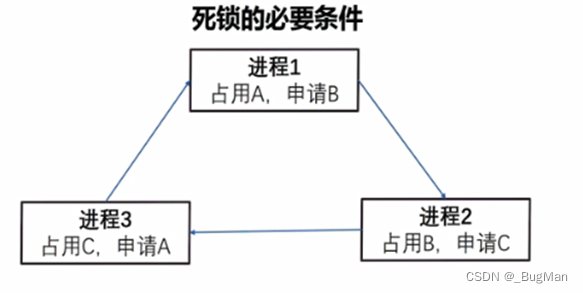
操作系统(4)进程管理(下)通信、死锁、调度
4.1.进程通信4.1.1.概述在一个进程调用另一个进程时,进程间需要进行通信。在管理进程时,需要与进程进行通信。4.1.2.管道通信Windows采用匿名管道技术进行进程间通信。匿名管道通信只支持具有亲缘关系的进程之间通信(父进程、子进程、兄弟进程)。管道是单向的,由写的一方建立,一头写一头读,若要双向通信,需要两条管道。Windows并不是只支持父子进程之间通信,因为Windows并不是只使....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
产品推荐
龙蜥操作系统
龙蜥社区(OpenAnolis)是面向国际的 Linux 服务器操作系统开源根社区及创新平台,秉承“平等、开放、协作、创新”的原则,理事会由阿里云、统信软件、龙芯、Arm 、Intel 等 24 家国内外头部企业共同组成,有超过 1000 家来自芯片厂商、软件厂商、整机厂商、操作系统厂商等覆盖操作系统全产业链的合作伙伴参与生态共建。
+关注