
Ubuntu安装ROS2并编写自己的程序(下)
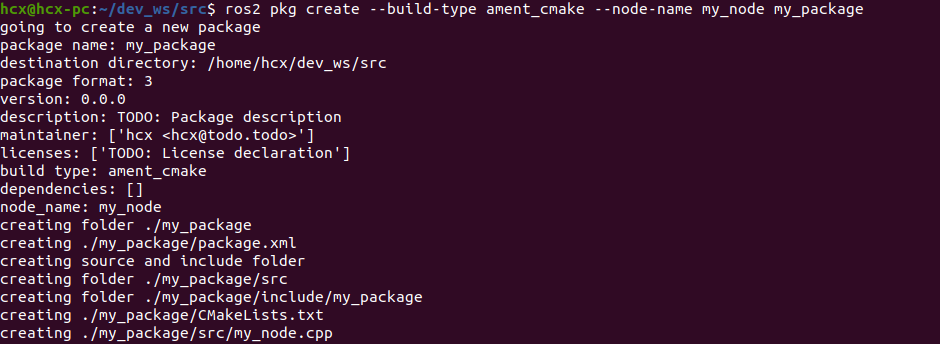
三、创建自己ROS2包3.1 创建功能包我们首先创建一个dev_ws/src的文件来存放我们自己的包mkdir -p ~/dev_ws/src打开终端后进入到dev_ws/src路径下:cd ~/dev_ws/src然后就可以使用如下语法来创建功能包了(以下二选一):CMake包:ros2 pkg create --build-type ament_cmake <package_name&a...
Ubuntu安装ROS2并编写自己的程序(上)
根据官方Distributions说明,Dashing Diademata为Ubuntu 18.04上支持最长的版本,下一个长期版本目标系统为 Ubuntu 20.04,因此作为学习的话,建议安装该版本,同时经过简单测试,当前ROS2对一般开发者并不算太友好,很多功能包也没有,不建议作为主力开发使用。ROS2架构说明可参考ROS2探索总结(六)——迎接ROS2.0时代的到来一、安装1. 设置本地....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
Ubuntu您可能感兴趣
- Ubuntu Linux
- Ubuntu Debian
- Ubuntu任务
- Ubuntu gui
- Ubuntu图形
- Ubuntu构建
- Ubuntu环境
- Ubuntu设置
- Ubuntu软件源
- Ubuntu文件
- Ubuntu安装
- Ubuntu系统
- Ubuntu配置
- Ubuntu服务器
- Ubuntu MySQL
- Ubuntu方法
- Ubuntu报错
- Ubuntu编译
- Ubuntu docker
- Ubuntu命令
- Ubuntu教程
- Ubuntu部署
- Ubuntu server
- Ubuntu搭建
- Ubuntu搜索
- Ubuntu蓝易云
- Ubuntu Windows
- Ubuntu版本
- Ubuntu nginx
- Ubuntu android
开发与运维
集结各类场景实战经验,助你开发运维畅行无忧
+关注