
基于Qlearning强化学习的机器人路线规划matlab仿真
1.算法仿真效果matlab2022a仿真结果如下(完整代码运行后无水印): 训练过程 测试结果 仿真操作步骤可参考程序配套的操作视频。 2.算法涉及理论知识概要 强化学习是机器学习中的一个重要领域,它主要研究智能体(agent)如何在环境中通过不断地试错来学习最优策略(policy&...
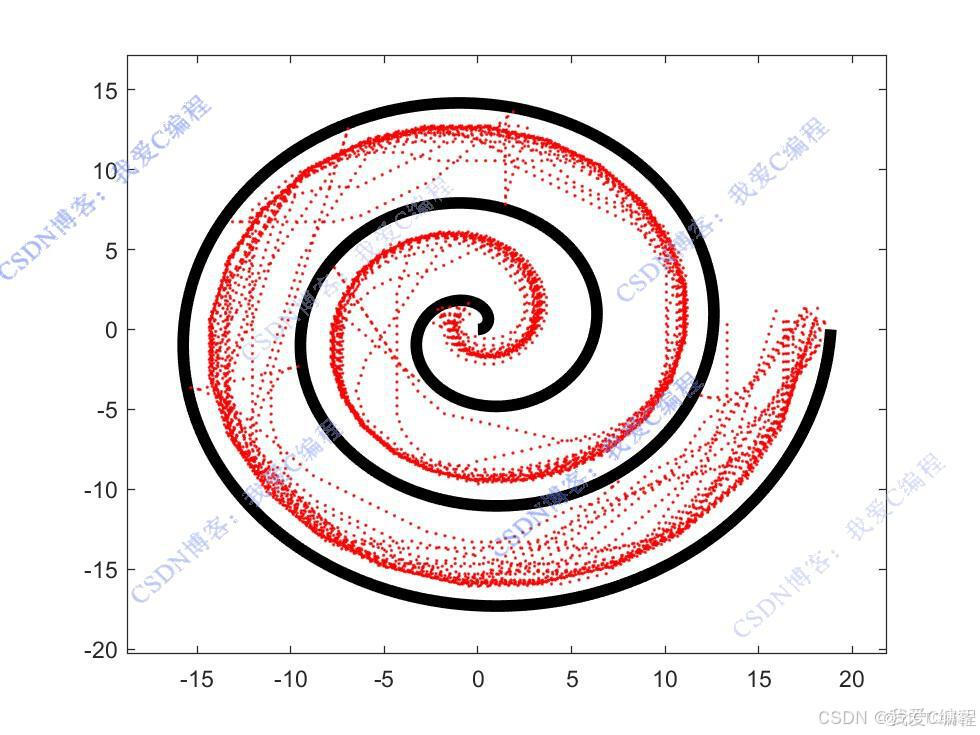
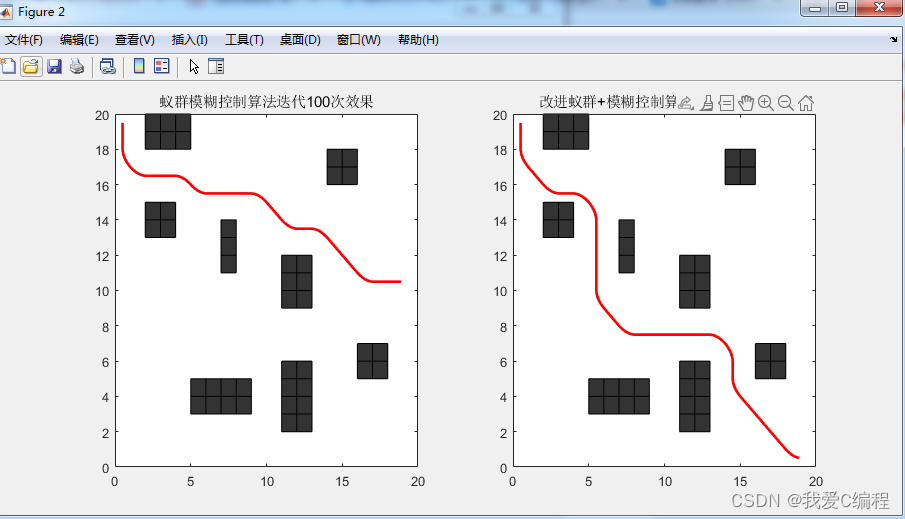
m基于蚁群优化模糊控制的机器人路线规划和避障算法matlab仿真
1.算法描述 蚁群算法是受到对真实蚂蚁群觅食行为研究的启发而提出。生物学研究表明:一群相互协作的蚂蚁能够找到食物和巢穴之间的最短路径,而单只蚂蚁则不能。生物学家经过大量细致观察研究发现,蚂蚁个体之间的行为是相互作用相互影响的。蚂蚁在运动过程中,能够在它所经过的路径上留下一种称之为信息素的物质,而此物质恰恰是蚂蚁个体之间信息传递交流的载体。蚂蚁在运动时能够感知这种物质,并且习惯于追踪此物质爬行...
基于Qlearning强化学习的机器人路线规划仿真
1.算法概述 假设我们的行为准则已经学习好了, 现在我们处于状态s1, 我在写作业, 我有两个行为 a1, a2, 分别是看电视和写作业, 根据我的经验, 在这种 s1 状态下, a2 写作业 带来的潜在奖励要比 a1 看电视高, 这里的潜在奖励我们可以用一个有关于 s 和 a 的 Q 表格代替, 在我的记忆Q表格中, Q(s1, a1)=-2 要小于 Q(s1, a2)=1, 所以我们判断...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
