
基于ADRC自抗扰算法的UAV飞行姿态控制系统simulink建模与仿真
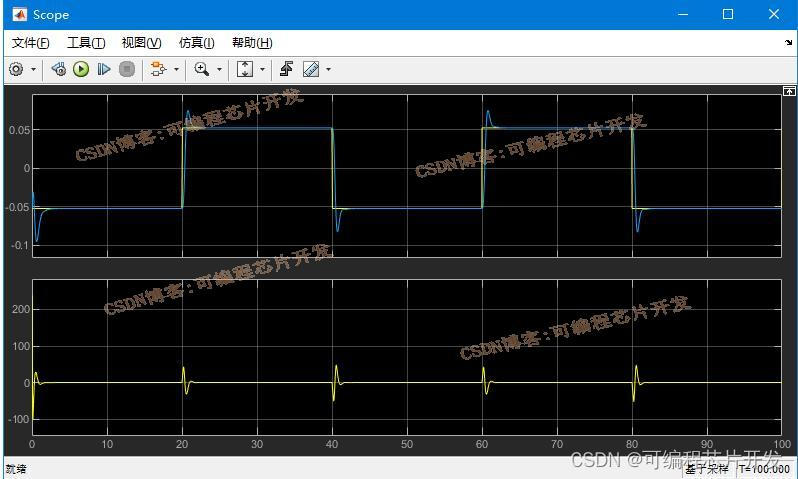
1.课题概述 基于ADRC自抗扰算法的UAV飞行姿态控制系统simulink建模与仿真,分别对YAW,PITCH,ROLL进行控制实现UAV的姿态控制。 2.系统仿真结果(完整程序运行后无水印) 3.核心程序与模型版本:MATLAB2022a 4.系统原理简介 在无人机(...
m基于PID控制算法的四旋翼无人机飞行控制simulink仿真
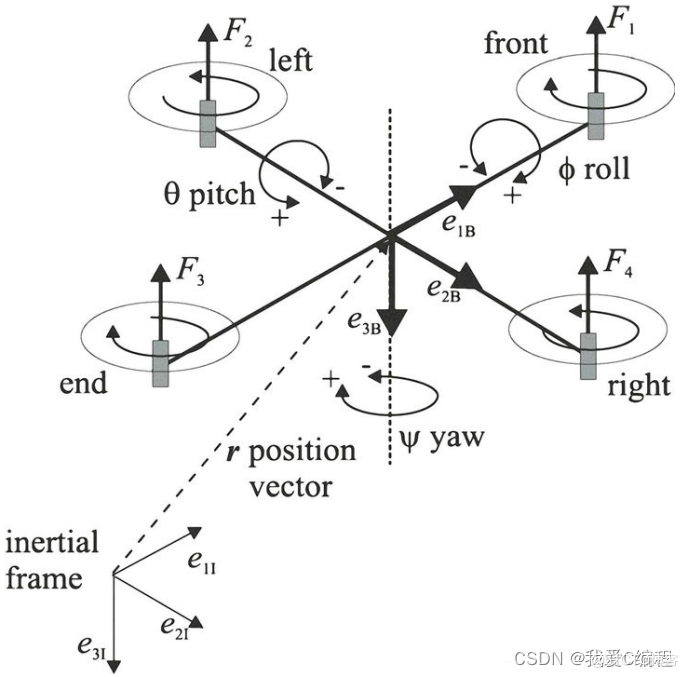
1.算法描述 无人机采用常见的四旋翼无人飞行器,如图1所示。 PID控制器,即控制器的控制方式为P比例调整,I积分调整以及D微分调整三个部分构成,PID控制器是目前为止应用最为广泛的控制方式。PID控制器具有结构简单,性能稳定,参数设置简单等优势。PID控制器适用于各种控制对象无法进行测量获得系统参数的情况,其根据控制对象的输出和参考控制变量的输入差进行实时的调整实现对未知参数控制对象的有效...
m基于内外环PD控制算法的四旋翼无人机飞行控制simulink仿真
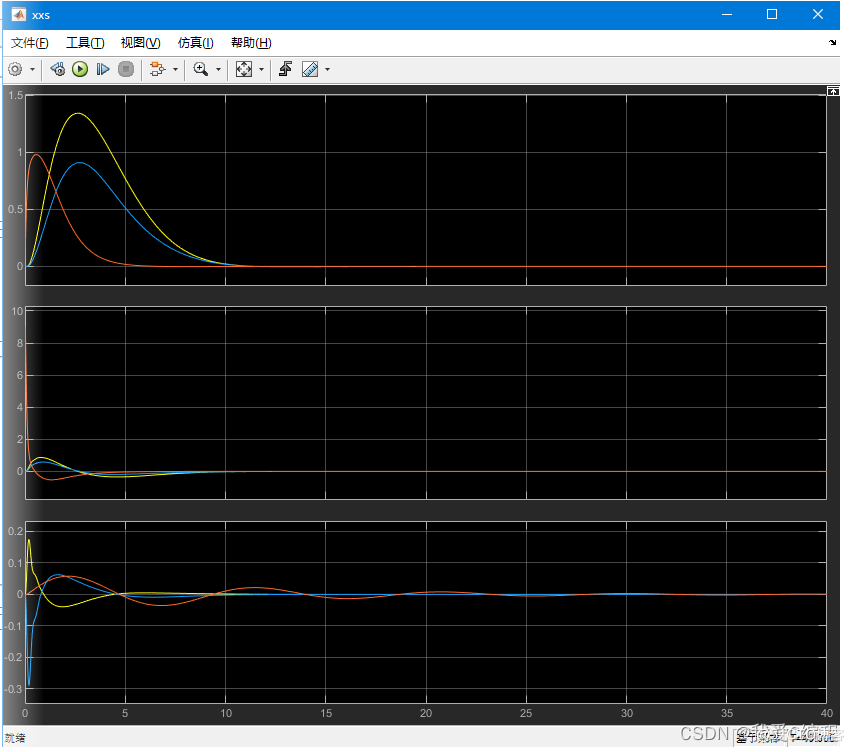
1.算法仿真效果matlab2022a仿真结果如下: 2.算法涉及理论知识概要 随着无人飞行器技术的不断发展,其在各个领域有着越来越多的应用,如商业领域通过无人机进行物件派送,在农业领域通过无人机进行农作物的监控,在军事领域通过无人机进行敌情监控等。无人机相对于载人飞机而言,最大的区别是其无人驾驶和自动飞行功能,由于飞行器省去了飞行员的质量,因此其质量较轻,可以充分利用空气动力来抵消大部分...
m基于flocking算法的无人机群空间避障飞行matlab仿真,对比二维场景和三维场景
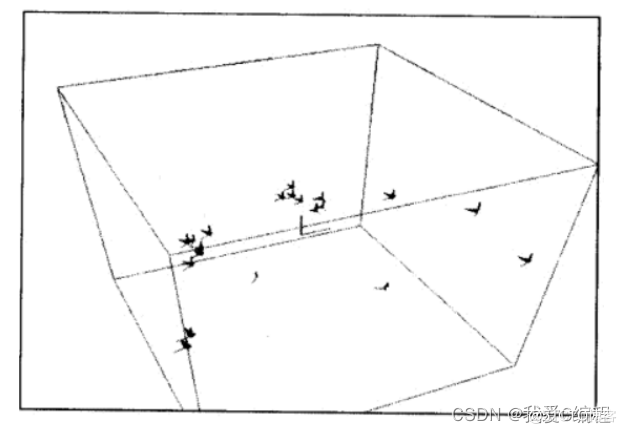
1.算法描述 近年来,随着通信网络、人工智能、自主系统、大数据的前沿技术的发展, 无人机蜂群作战也正在由概念变成现实,从理论走向实践。航迹规划,多机协作, 集群控制等问题成为当下研究热点。在军事作战中派遣多无人机协同作战相比于 单无人机能够在穿透敌方防御系统,探测目标以及执行攻击任务等方面更具优势 [1],采用大规模、低成本的无人机蜂群进行低空突防,实施饱和攻击已成为一种全 新的"非对称"...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
算法更多仿真相关

智能搜索推荐
智能推荐(Artificial Intelligence Recommendation,简称AIRec)基于阿里巴巴大数据和人工智能技术,以及在电商、内容、直播、社交等领域的业务沉淀,为企业开发者提供场景化推荐服务、全链路推荐系统开发平台、工程引擎组件库等多种形式服务,助力在线业务增长。
+关注