
RDT:清华开源全球最大的双臂机器人操作任务扩散基础模型、代码与训练集,基于模仿能力机器人能够自主完成复杂任务
❤️ 如果你也关注 AI 的发展现状,且对 AI 应用开发非常感兴趣,我会每日跟你分享最新的 AI 资讯和开源应用,也会不定期分享自己的想法和开源实例,欢迎关注我哦! 微信公众号|搜一搜:蚝油菜花 快速阅读 模型介绍:RDT是全球最大的双臂机器人操作任务扩散基础模型,具备十亿参数量,能够自主完成复杂任务。 主要功能:RDT支持双臂协调操作、自主任务执行、高精确度操作、语言指令理解和...
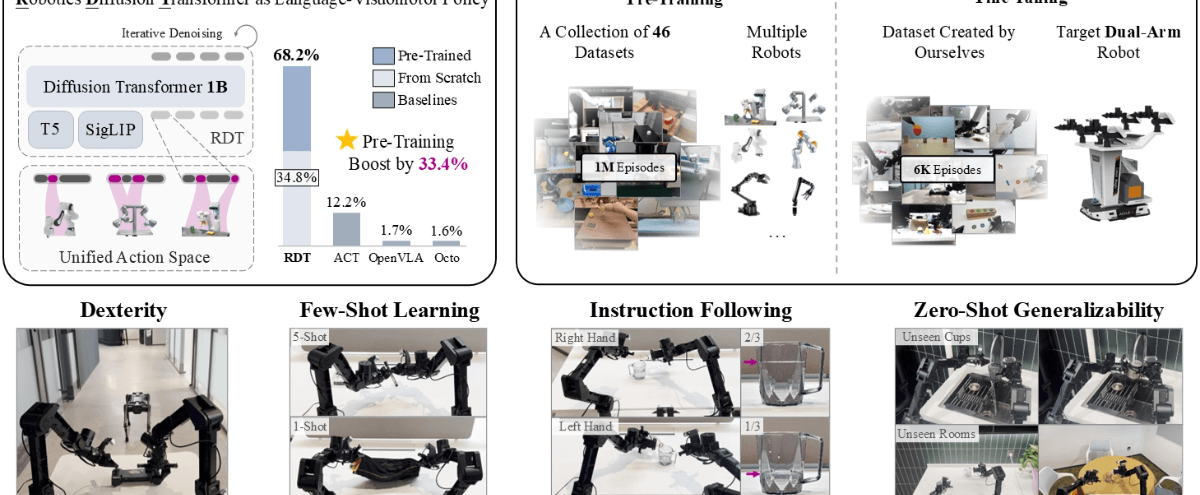
清华开源全球最大双臂机器人扩散大模型RDT,懂调酒能遛狗,登顶HF具身热榜
近日,清华大学开源了全球最大的双臂机器人扩散大模型RDT(Robotic Diffusion Transformer),该模型在机器人领域引起了广泛关注。RDT不仅在调酒和遛狗等任务上表现出色,还成功登顶了Hugging Face(HF)的具身智能热榜。这一成果不仅展示了清华在机器人技术领域的领先地...
Moveit + Gazebo实现联合仿真:ABB yumi双臂机器人( 二、双臂协同运动实现 )
1. 安装并配置好ROS、MoveIt和Gazebo。 2. 导入ABB YuMi双臂机器人模型到Gazebo。 3. 使用MoveIt配置双臂机器人的URDF文件。 4. 编写一个Python脚本来实现双臂协同运动。 以下是一个简单的Python脚本示例,用于实现ABB YuMi双臂机器人的协同运动: ...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
