
09 机器人仿真Gazebo实例
零、Gazebo 1. Gazebo是开源物理仿真环境 支持:三维可视化环境传感器仿真、噪声仿真云仿真、远程仿真等功能 2. 安装对应版本的Gazebo sudo apt-get install ros-noetic-gazebo-ros-pkgs sudo apt-get install ros-noetic-gazebo-ros-control 3.进入Gazebo rosc...
ROS中阶笔记(四):机器人仿真—Gazebo物理仿真环境搭建(重点)
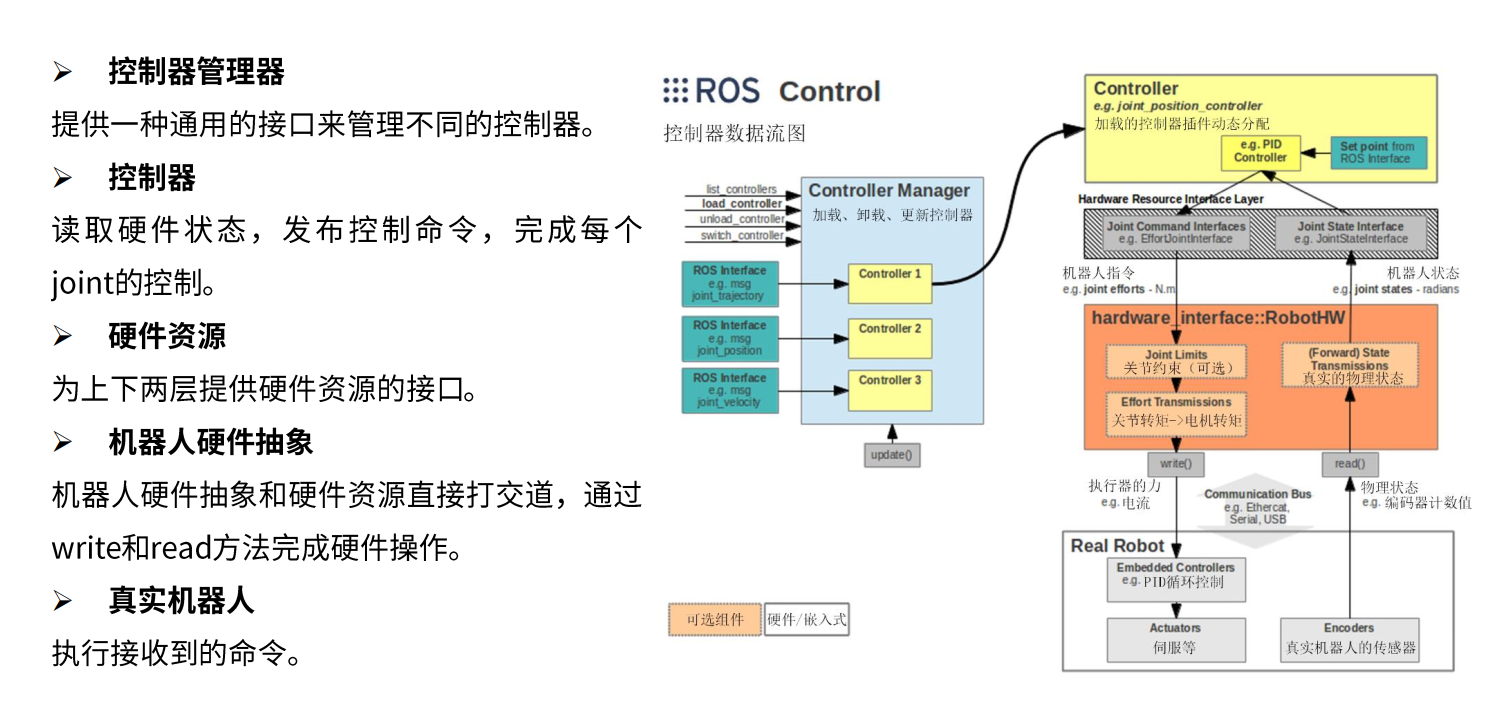
1 ros_controlROS为开发者提供的机器人控制中间件包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等可以帮助机器人应用功能包快速落地,提高开发效率Controller_manager 与很多controller都已经很完善了,需要写的就是robothw部分ros_control的功能主要通过controller来实现的1.1 ros_control安装ros_contro....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。

