
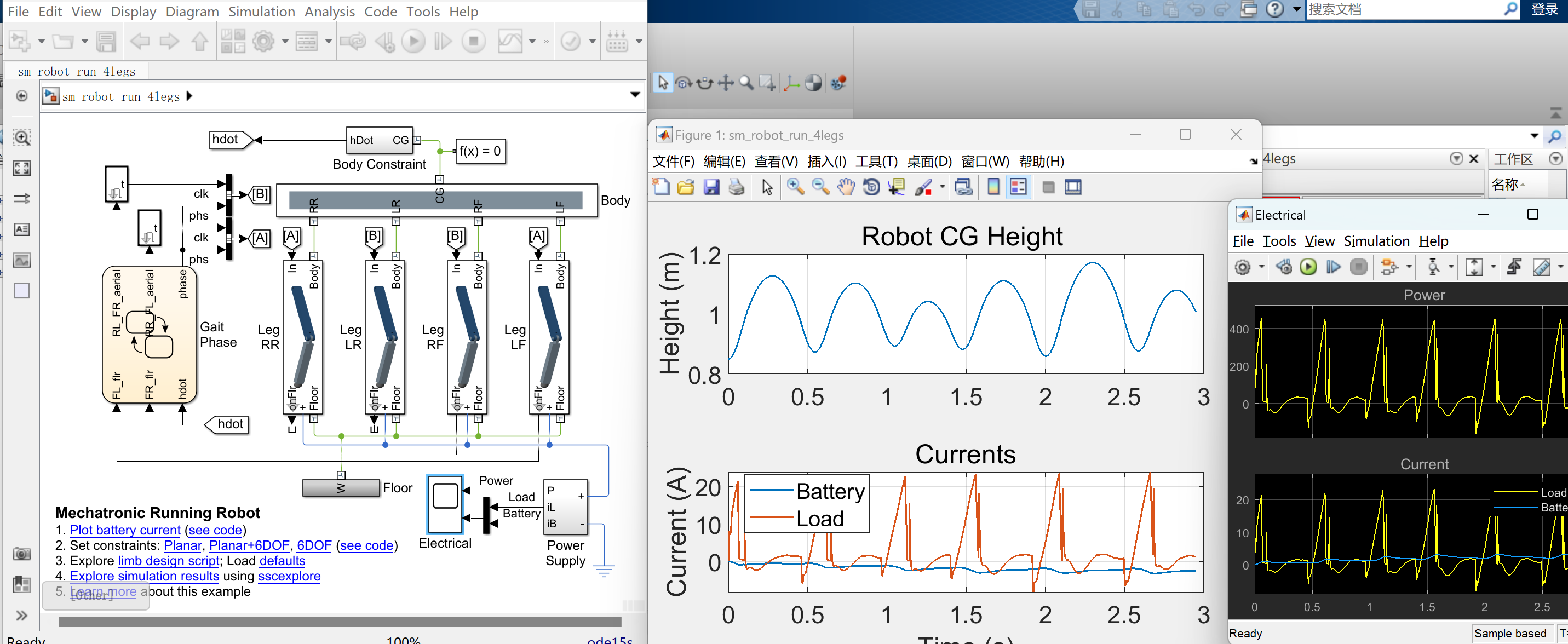
具有电动驱动的四足机器人模型研究(Simulink&Matlab代码)
1 概述对具有电动驱动的四足机器人进行建模可以涉及以下几个方面:1.机械结构建模:对机器人的身体结构进行建模,包括身体的形状、大小和连接方式等。可以使用CAD软件进行三维建模,或者使用刚体模型进行简化建模。2.运动学建模:根据机器人的身体结构和关节连接方式,建立运动学模型,描述机器人的运动学关系。这包括肢体的长度、关节的自由度和关节角度等。3.步态规划:根据机器人的运动学模型和运动要求,设计合适....
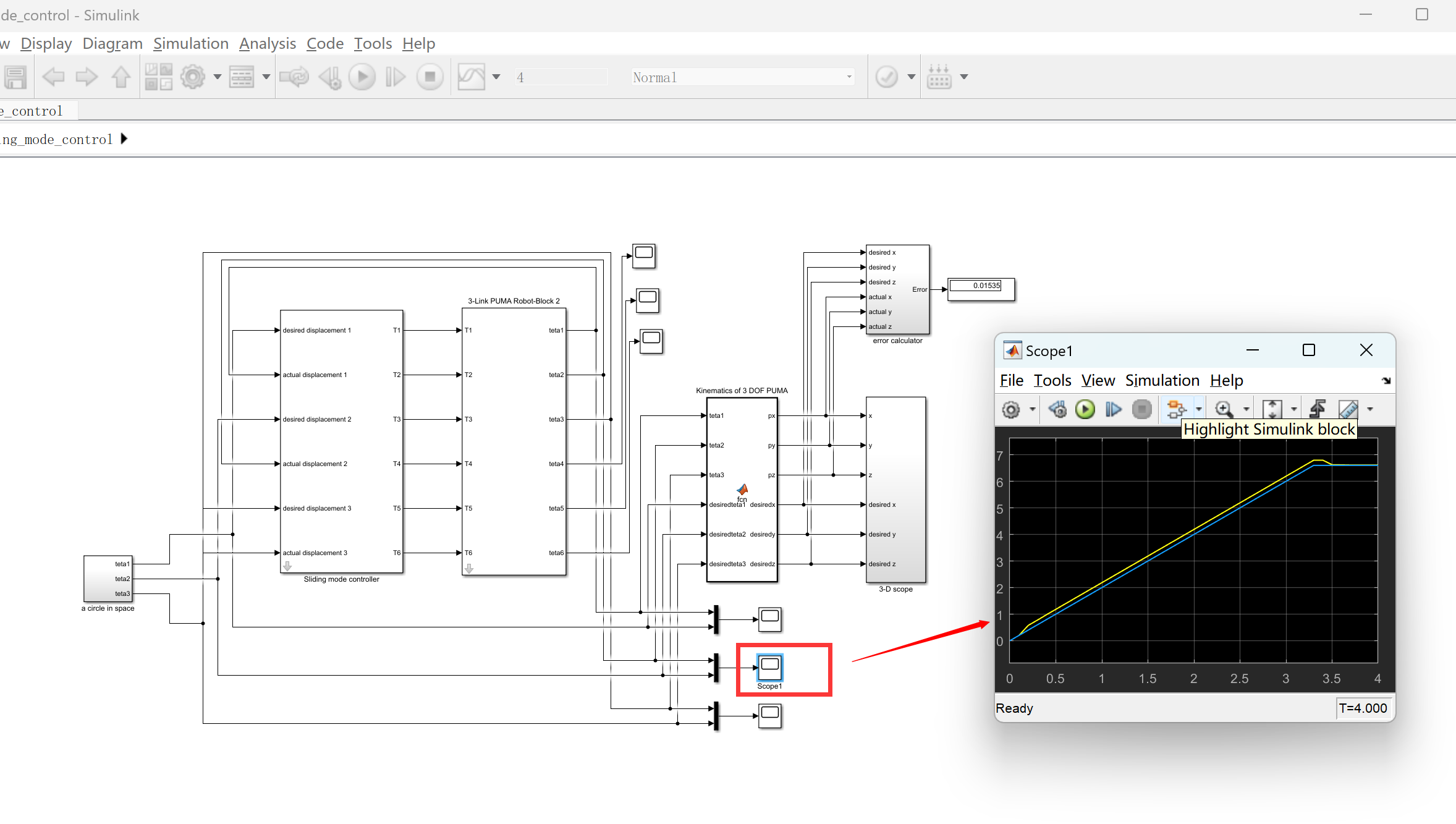
三自由度PUMA机器人非线性控制研究(Matlab代码、Simulink仿真实现)
1 概述针对三自由度PUMA560机器人的控制问题,可以使用三种不同的非线性控制算法:计算扭矩控制、滑模控制和反步控制。下面简要介绍这些算法的基本原理:1. 计算扭矩控制(Computed Torque Control):计算扭矩控制是一种基于模型的控制方法,通过反馈线性化将非线性系统线性化,然后设计一个线性控制器来跟踪期望轨迹。控制器根据系统模型计算所需的关节扭矩,以达到期望的位置、速度和加速....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。

