
C++ PCL 求两个平面的交线
#include <iostream> #include <pcl/common/common.h> #include <pcl/common/geometry.h> #include <pcl/visualization/pcl_visualizer.h> int main() { // 定义两个平面的法向量 Eigen::Ve...
C++ PCL 将一个点云投影到一个由法向量和点确定的平面
步骤实现: 定义平面:使用法向量和平面上的一个点来定义平面方程。 计算投影矩阵:根据平面方程计算点到平面的投影矩阵。 应用投影矩阵:将点云中的每个点投影到平面上。 ...
C++ PCL 计算多个RT矩阵变换后的变换矩阵
在PCL(Point Cloud Library)中,如果有两个变换矩阵,想要计算它们的组合结果,可以通过以下步骤实现: 创建变换矩阵对象:使用PCL的Eigen::Matrix4f类来表示变换矩阵。 定义变换矩阵:为两个RT(Rotation-Translation)矩阵定义Eigen::Matrix4f变量。例如: ...
C++ PCL 沿着自定义的平面做横截面(直通滤波)
#include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/filters/pass_through.h> #include <pcl/common/transforms.h> #include <pcl/common/centroid.h> // 根.....
C++ PCL 设置法向量的方向
在使用点云库(Point Cloud Library, PCL)进行法向量估计时,可以通过设置法向量的方向来控制估计的结果。具体来说,PCL中可以通过以下方式来设置法向量的方向: 法向量估计方法的选择: 在进行法向量估计之前,需要选择合适的方法。PCL提供了不同的法向量估计算法,比如基于最近邻搜索的方法(如Integral Image Normal Estimation...
C++ PCL SACSegmentationFromNormals setAxis 轴向的选择
水平表面检测 场景:检测水平的地面或平台。 选择的轴:选择与地面法线方向对齐的轴,通常是 Z 轴,因为水平表面的法线方向是垂直向上的(沿 Z 轴方向)。 ...
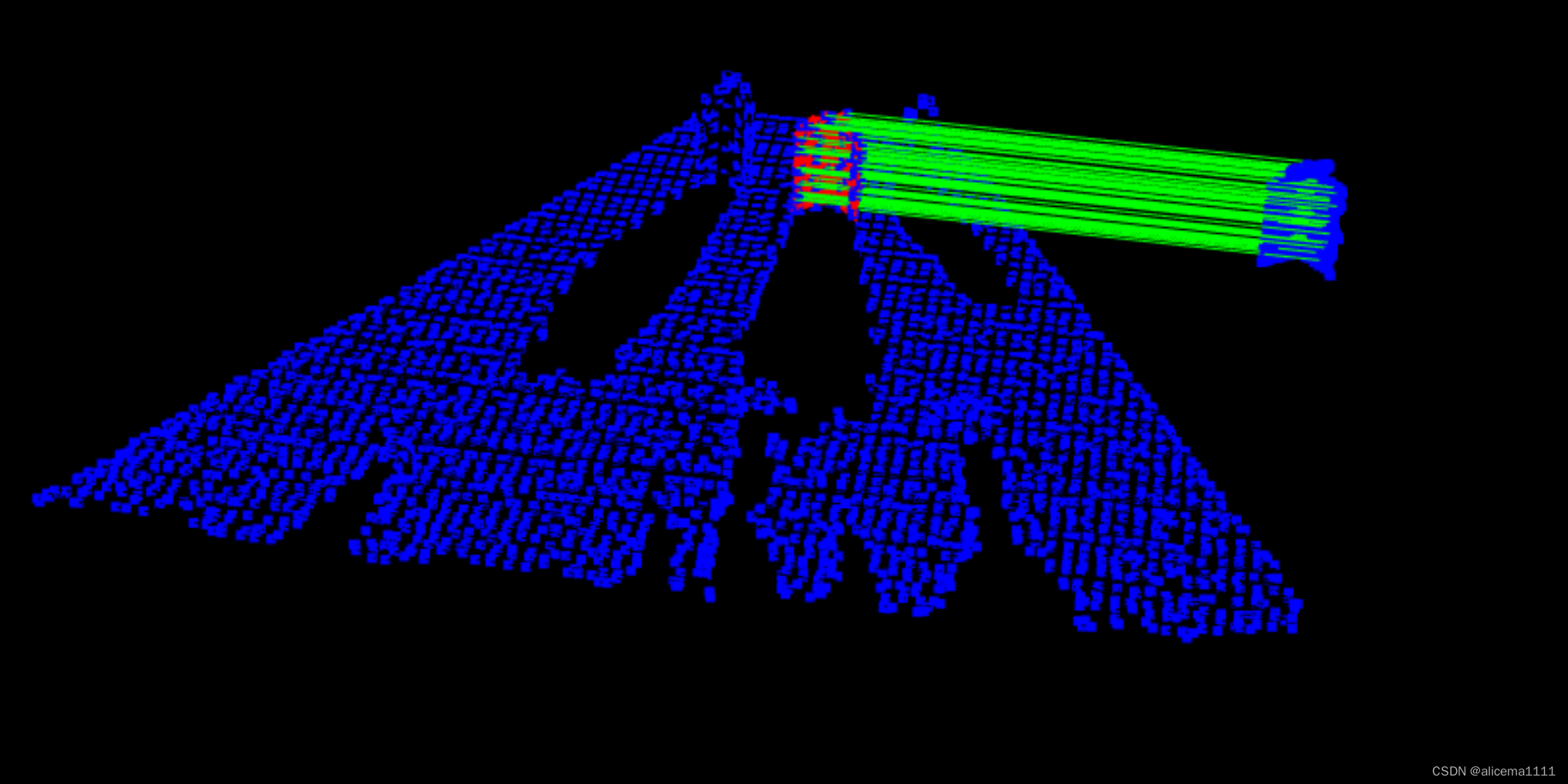
C++ PCL三维点云物体目标识别
程序示例精选C++ PCL三维点云物体目标识别如需安装运行环境或远程调试,可点击 博主头像进入个人主页查看博主联系方式,由专业技术人员远程协助! 前言 这篇博客针对《C++ PCL三维点云物体目标识别》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。 运行结果 文章目录 一、所需工具软件二、使用步骤1. 主要代码2. 运行结果三、在线协助 一、所需工具软件 1. ...
【C++】CMake中Visual Studio的MSVC版本与PCL版本对应关系
MSVC 与 Visual Studo 版本对应关系:Visual Studio VersionMSVC VersionVisual Studio 2022 version 17.0.1-17.3.41930 -1933Visual Studio 2019 version 16.00-16.11.21920 -1929Visual Studio 2017 version 15.0-15. 9.1....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
开发与运维
集结各类场景实战经验,助你开发运维畅行无忧
+关注