
ROS入门笔记(十一):编写与测试简单的Service和Client (Python)
01 导读C++代码必须通过编译生成可执行文件;python代码是可执行文件,不需要编译;开发的功能包都放在catkin_ws这样一个工作空间里;新建的功能包取名为service_example,实现两个整数求和为例,client端节点向server端节点发送a、b的请求,server端节点返回响应sum=a+b给client端节点;通信网络结构如图所示:服务编程流程创建服务器创建客户端添加编译....

ROS入门笔记(十):编写与测试简单的消息发布器和订阅器(C++)
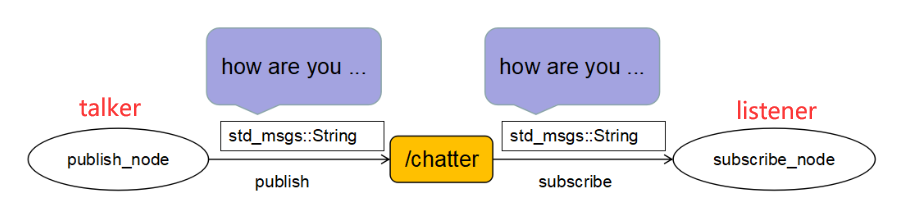
01 导读开发的功能包都放在catkin_ws这样一个工作空间里;新建的功能包取名为topic_example,在这个功能包中分别编写两个节点程序talker.cpp和listener.cpp,发布节点(talker)向话题(chatter)发布std_msgs::String类型的消息,订阅节点(listener)从话题(chatter)订阅std_msgs::String类型的消息;这里消息....
Python3入门笔记八之错误、调试和测试
错误处理机制try...except...finally...这个的使用和 java 的 try-catch-finally 差不多,只是多了个else来表示没有异常的时候,注意捕获的异常的类 要从子类到父类try: print('try...') r = 10 / int('2') print('result:', r) except ValueError as e: ...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
测试更多笔记相关
- 机器学习测试笔记模型
- 机器学习测试笔记模型评估优化
- 机器学习测试笔记
- 机器学习测试笔记特征选择
- 机器学习测试笔记散点图
- 机器学习测试笔记降维
- 机器学习测试笔记线性回归函数
- 机器学习测试笔记线性回归
- 机器学习测试笔记支持向量机
- 机器学习测试笔记决策树随机森林
- 软件笔记测试
- 软件评测师笔记测试
- 探索性测试笔记
- exch-pop3互通测试笔记
- 软件探索性测试笔记
- 软件评测笔记测试
- 机器学习测试笔记数据清洗
- 笔记开发板测试
- 自增列测试r12笔记
- jmeter笔记测试
- exch-pop3互通测试笔记服务器搭建
- resiprocate学习测试笔记
- 测试exchange笔记
- 开发者笔记测试
- 测试笔记owa
- kvm测试笔记
- 闪回测试笔记
开发与运维
集结各类场景实战经验,助你开发运维畅行无忧
+关注