
深度强化学习之gym扫地机器人环境的搭建(持续更新算法,附源码,python实现)
想要源码可以点赞关注收藏后评论区留下QQ邮箱本次利用gym搭建一个扫地机器人环境,描述如下:在一个5×5的扫地机器人环境中,有一个垃圾和一个充电桩,到达[5,4]即图标19处机器人捡到垃圾,并结束游戏。同时获得+3的奖赏。左下角[1,1]处有一个充电桩,机器人到达充电桩可以充电且不再行走,获得+1的奖赏。环境中间[3,3]处有一个障碍物,机器人无法通过。扫地机器人具体流程如下1:每局游戏开始 机....
深度强化学习之gym扫地机器人环境的搭建(持续更新算法,附源码,python实现)
想要源码可以点赞关注收藏后评论区留下QQ邮箱本次利用gym搭建一个扫地机器人环境,描述如下:在一个5×5的扫地机器人环境中,有一个垃圾和一个充电桩,到达[5,4]即图标19处机器人捡到垃圾,并结束游戏。同时获得+3的奖赏。左下角[1,1]处有一个充电桩,机器人到达充电桩可以充电且不再行走,获得+1的奖赏。环境中间[3,3]处有一个障碍物,机器人无法通过。扫地机器人具体流程如下1:每局游戏开始 机....
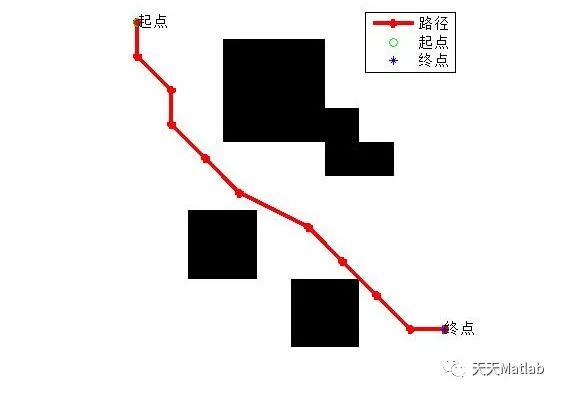
【路径规划-机器人栅格地图】基于哈里斯鹰算法求解栅格地图路径规划及避障含Matlab源码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab仿真内容点击智能优化算法 神经网络预测雷达通信 无线传感器信号处理图像处理路径规划元胞自动机无人机⛄ 内容介绍静态环境中的移动机器人全局路径规划是路径规划中的一个重要问题,本文采用哈里斯鹰解决移动机器人的路径规划....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
算法更多源码相关

智能引擎技术
AI Online Serving,阿里巴巴集团搜推广算法与工程技术的大本营,大数据深度学习时代的创新主场。
+关注