
具有电动驱动的四足机器人模型研究(Simulink&Matlab代码)
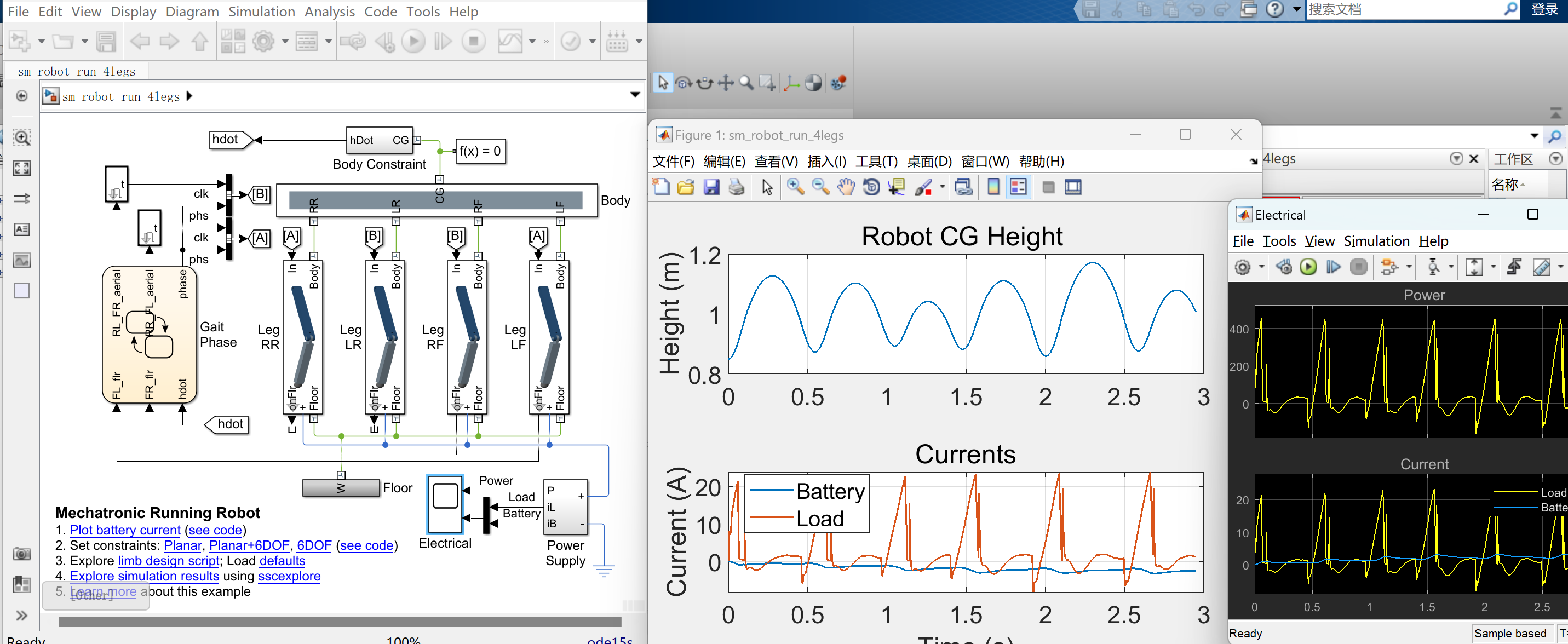
1 概述对具有电动驱动的四足机器人进行建模可以涉及以下几个方面:1.机械结构建模:对机器人的身体结构进行建模,包括身体的形状、大小和连接方式等。可以使用CAD软件进行三维建模,或者使用刚体模型进行简化建模。2.运动学建模:根据机器人的身体结构和关节连接方式,建立运动学模型,描述机器人的运动学关系。这包括肢体的长度、关节的自由度和关节角度等。3.步态规划:根据机器人的运动学模型和运动要求,设计合适....
液态金属驱动机器人研究取得进展
中国科学技术大学精密机械与精密仪器系副教授张世武研究团队、澳大利亚伍伦贡大学教授李卫华研究团队和苏州大学机器人与微系统中心副教授李相鹏研究团队组成的联合研究组,设计了基于镓基室温液态金属的新型机器人驱动器,首次实现了液态金属驱动的功能性轮式移动机器人。近日,该成果以 A Wheeled Robot Driven by a Liquid‐Metal Droplet 为题,发表在《先进材料》杂志上(....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
