
如何使用获取网页元素的HTML代码_机器人流程自动化
1. 组件介绍说明必要前置组件:打开新网页或获取已打开网页打开新网页获取已打开网页利用本组件可以获取Chrome、Edge、IE浏览器指定页面中目标控件的html网页源码。2. 输入项说明请参照可视化编辑器内组件面板中各输入项的帮助信息3. 输出项说明请参照可视化编辑器内组件面板中各输出项的帮助信息...
启动RPA客户端报找不到vcruntime140.dll无法继续执行代码_机器人流程自动化
问题现象启动阿里云RPA时,系统提示错误,由于找不到vcruntime140.dll ,无法继续执行代码。重新安装程序可能会解决此问题。问题原因vcruntime140.dll文件即动态链接库文件,系统缺少了这个文件,丢失原因有可能是杀毒软件误杀导致的。如果电脑中丢失了某个dll文件,可能会导致某些...
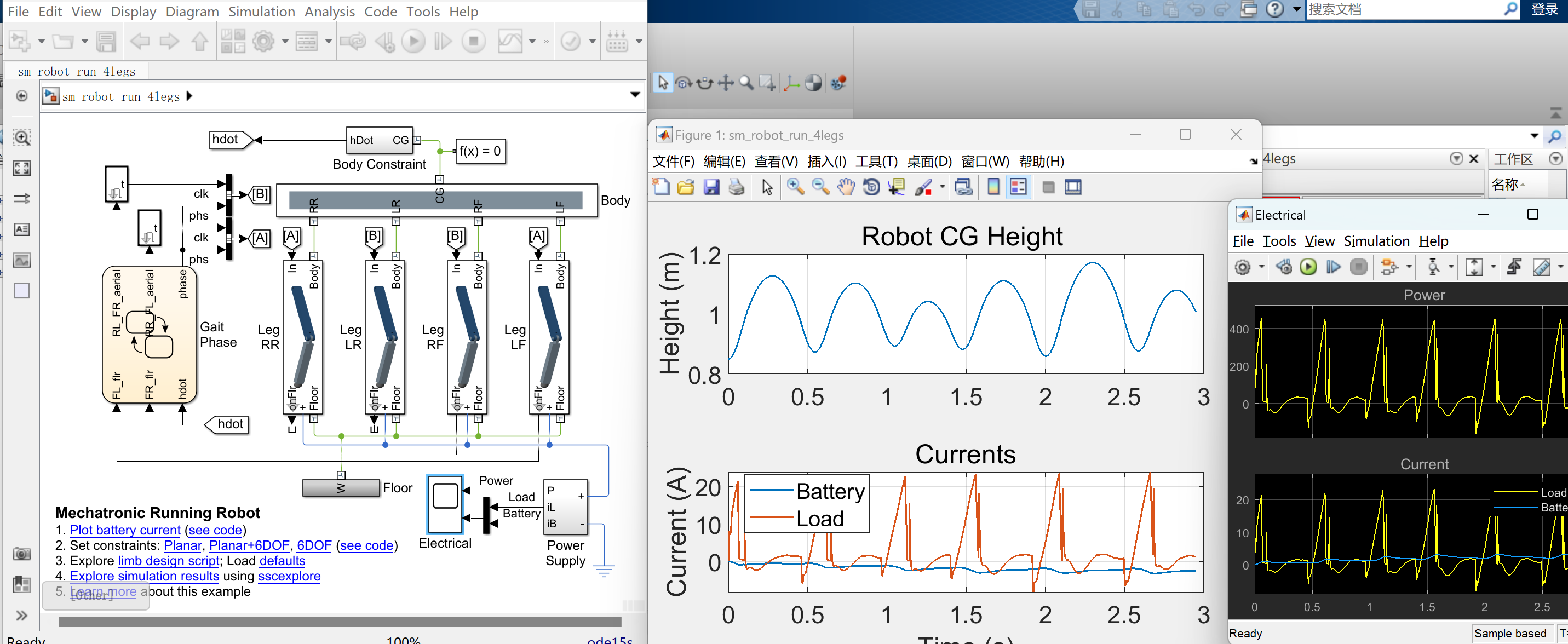
具有电动驱动的四足机器人模型研究(Simulink&Matlab代码)
1 概述对具有电动驱动的四足机器人进行建模可以涉及以下几个方面:1.机械结构建模:对机器人的身体结构进行建模,包括身体的形状、大小和连接方式等。可以使用CAD软件进行三维建模,或者使用刚体模型进行简化建模。2.运动学建模:根据机器人的身体结构和关节连接方式,建立运动学模型,描述机器人的运动学关系。这包括肢体的长度、关节的自由度和关节角度等。3.步态规划:根据机器人的运动学模型和运动要求,设计合适....
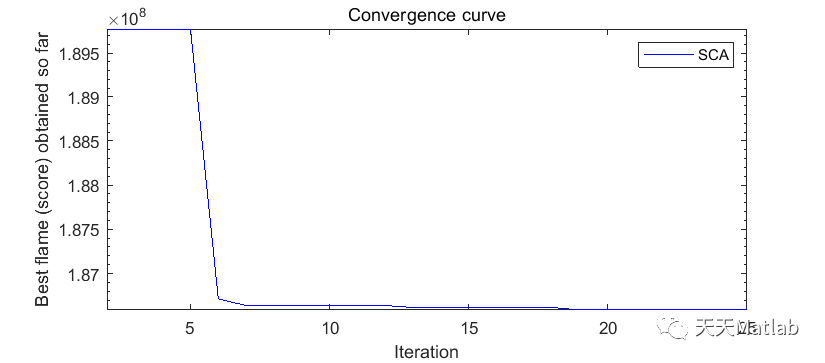
【PID优化】基于正余弦算法 (SCA)优化PID实现微型机器人系统位置控制附simulink模型和matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab仿真内容点击智能优化算法 神经网络预测雷达通信 无线传感器信号处理图像处理路径规划元胞自动机无人机 电力系统⛄ 内容介绍本研究提出了一种使用比例-积分-微分 (PID) 控制器控制微型机器人系统位置的新方法。利用正余弦算法(....
RPA有哪些错误代码表
错误代码描述语意0result.success调用成功10000system.systemError系统发生错误,请稍后重试10001system.rpcCallFailed远程调用失败10002system.serviceCallFailed微服务调用失败10003system.concurren...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
