
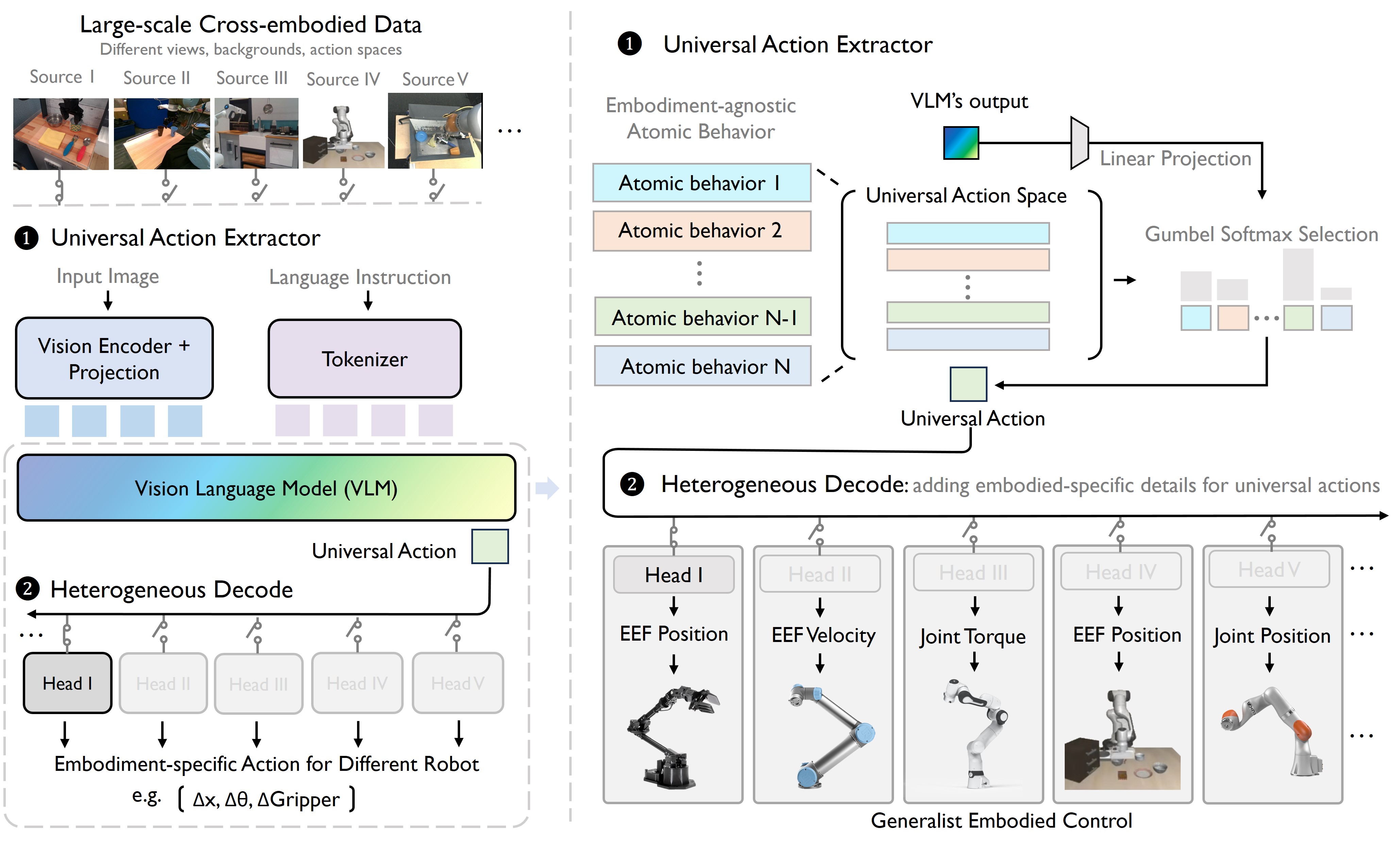
UniAct:清华团队突破!跨平台机器人通用模型,仅需50条数据就能快速适配新环境
❤️ 如果你也关注 AI 的发展现状,且对 AI 应用开发感兴趣,我会每日分享大模型与 AI 领域的开源项目和应用,提供运行实例和实用教程,帮助你快速上手AI技术! AI 在线答疑 -> 智能检索历史文章和开源项目 -> 丰富的 AI 工具库 -> 每日更新 -> 尽在微信公众号 -> 搜一搜:蚝油菜花 "机器人开发者必看!清华黑科技打破行业瓶颈:1个模型控...
Jim Fan全华人团队HOVER问世,1.5M小模型让机器人获潜意识!
在机器人技术领域,人形机器人的全身控制一直是一个复杂而具有挑战性的问题。由于人形机器人需要适应各种不同的任务,如导航、移动操作和桌面操作等,每种任务都需要不同的控制模式。例如,导航任务需要跟踪机器人的根速度,而桌面操作任务则需要优先考虑上半身的关节角度跟踪。 传统的方法通常为每种特定的控制模式训练单独的策略,但这...
聚焦视听触感官协同配合的具身精细操纵,人大胡迪团队领衔探索机器人模态时变性挑战
在人机交互领域,机器人如何像人类一样灵活地运用多种感官进行精细操作,一直是研究的热点和难点。近日,中国人民大学胡迪团队在《Play to the Score: Stage-Guided Dynamic Multi-Sensory Fusion for Robotic Manipulation》一文中,提出了一种名为MS-Bot的新型方法&#...
朱玉可团队新作:看一眼就能模仿,大模型让机器人轻松学会撒盐
在人工智能领域,机器人的操作技能学习一直是一个挑战性的问题。传统的机器人学习方法需要大量的示范和训练,这不仅耗时耗力,而且难以适应复杂的现实环境。然而,朱玉可团队的最新研究为这个问题提供了一种创新的解决方案。 朱玉可团队来自UT Austin和NVIDIA Research,他们致力于研究如何通过模仿人类行为来教会机器人操作技...
北航团队取得新突破,创新性的为水下机器人加上“吸盘”
如此一来,水下机器人将如同鱼类一样可以吸附在动物或是物体上。 在机器人领域,水下机器人市场无疑是一个“大蓝海”,引得众多玩家纷纷跳入。在行业级市场,探测、检修等等是最为常见的应用,而拍照、探险则是消费级玩家购买水下机器人的动因。 同时,我们可以发现,因为水下的阻力等多种因素,现在的水下机器人多是以螺旋桨推进为前进的动力。而就在最近,北航副教授文力带领着团队研发出了...

大学团队打造手语翻译机器人,完整安装下来需要149个小时
目前,该机器人尚且只能将文字翻译为手势。 近日,来自安特卫普大学的一个团队正在开发一种机器人手语翻译器,顾名思义,就是将文本翻译成手语手势的机器人。 这个机器人名为“Project Aslan”,是一个3D打印的机器人手臂。具体细节上,Project Aslan是由入门级3D台式打印机3D打印的25个塑料部件和16个伺服电机,3个电机控制器,Arduino ...
北航团队四年研究成果登上《科学·机器人》长文封面,仿生学科研又上一层楼
多姿多彩的大自然,总能给人类无穷无尽的灵感,因而造就了很多科学技术的发明。人们模仿生物的特殊本领,利用生物结构和功能原理,研制机械或各种新技术,这就是仿生学。而今,又一项精彩的仿生学成果在北京航空航天大学诞生了。 9月21日,国际顶级期刊《科学》(Science)杂志机器人子刊《科学·机器人学》(Science Robotics)以长篇封面报道刊登北京航空航天大学文力副教授课题组牵头、与哈佛大学....

真·稳如狗:中国团队推出四足机器人,对标波士顿动力
今日宇树科技发布了他们的四足机器人莱卡狗(Laikago),这是国内首个正式对外发布的四足机器人。 在足式机器人领域,创建于1992年的波士顿动力已经成了世界上最具影响力的机器人公司之一,在过去的25年一直保持研究的精神陆续研发出Petman、BigDog、Spot等双足或四足机器人,每一次都令业界振奋不已。而现在,国内也终于有企业做出了在性能上接近波士顿动力的足式机器人。 莱卡狗(Laika.....

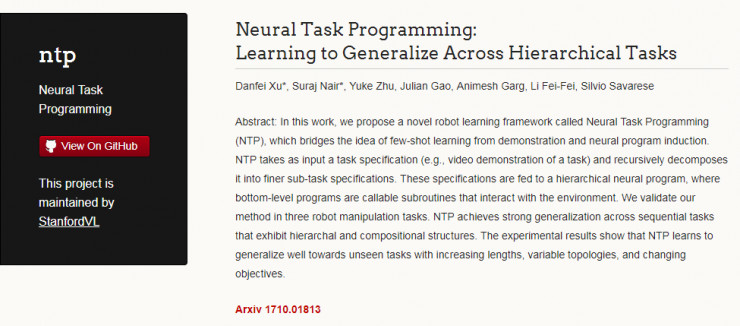
李飞飞团队最新跨界研究:神经任务编程NTP,让机器人具有强大泛化能力
9月26日,在温哥华举行的IROS大会上,计算机视觉专家、斯坦福AI Lab&Vision Lab主任李飞飞做了“A Quest for Visual Intelligence”的演讲,这也是李飞飞首次参加IROS这一机器人为主题的大会。值得注意的是,近日雷锋网在Arxiv发现了一篇讲述新型机器人学习框架的论文《Neural Task Programming: Learning to G....
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
