
如何使用获取网页元素的HTML代码_机器人流程自动化
1. 组件介绍说明必要前置组件:打开新网页或获取已打开网页打开新网页获取已打开网页利用本组件可以获取Chrome、Edge、IE浏览器指定页面中目标控件的html网页源码。2. 输入项说明请参照可视化编辑器内组件面板中各输入项的帮助信息3. 输出项说明请参照可视化编辑器内组件面板中各输出项的帮助信息...
启动RPA客户端报找不到vcruntime140.dll无法继续执行代码_机器人流程自动化
问题现象启动阿里云RPA时,系统提示错误,由于找不到vcruntime140.dll ,无法继续执行代码。重新安装程序可能会解决此问题。问题原因vcruntime140.dll文件即动态链接库文件,系统缺少了这个文件,丢失原因有可能是杀毒软件误杀导致的。如果电脑中丢失了某个dll文件,可能会导致某些...
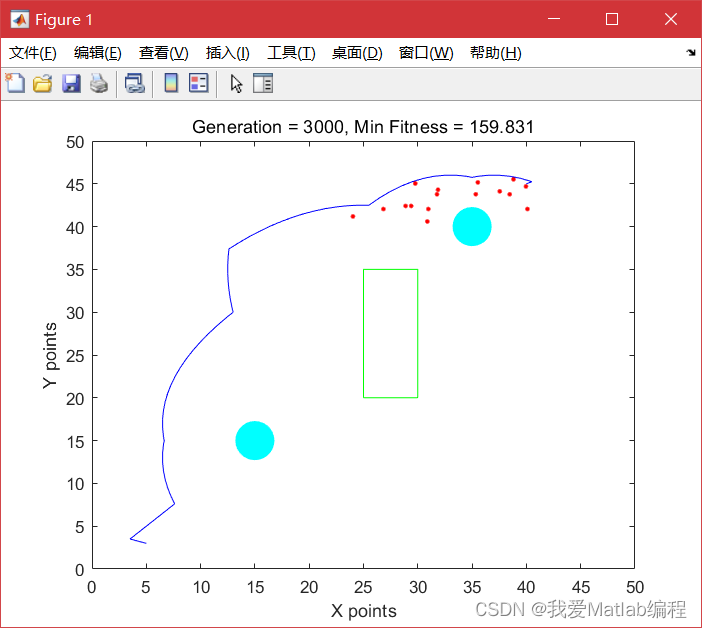
遗传算法在机器人路径规划中的应用研究(Matlab代码实现)
1 概述机器人运动规划是移动机器人导航的核心技术之一。40多年来,运动规划技术发展迅速,涌现出了许多规划算法,但因为环境描述方式差异巨大,技术差别大,实验比较难度较大。在总结机器人发展史上具有典型意义的规划算法的基础上,提出了路径规划算法的评价标准和形式化描述方式,介绍了每种算法的原理或技术,从搜索策略和环境建模的角度将它们分为四大类,分别是基于自由空间几何构造的规划算法、前向图搜索算法、基于随....
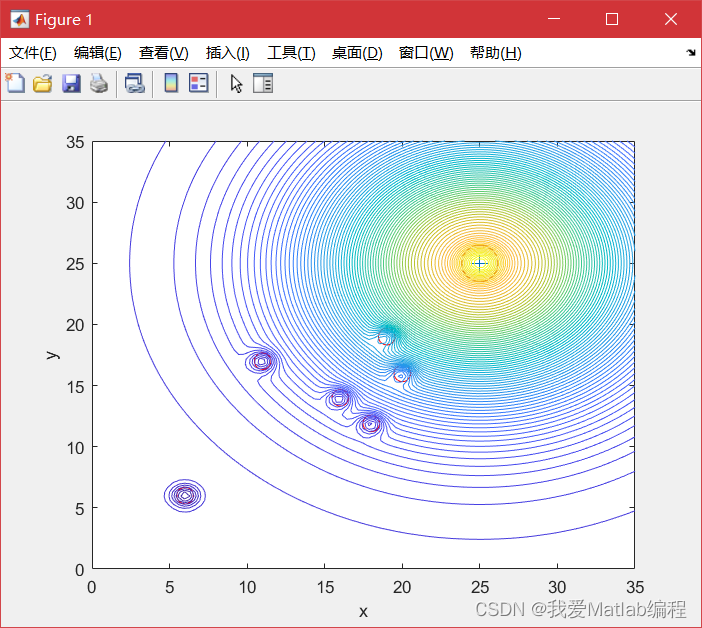
基于人工势场法的移动机器人路径规划研究(Matlab代码实现)
1 概述路径规划是移动机器人领域的热点研究方向,人工势场法已在工业机器人路径规划中得到广泛应用,近年来正逐步应用于农业工程的路径规划问题中。首先对路径规划中人工势场法的原理及传统人工势场法存在的缺陷进行分析,针对人工势场法中的局部极小值和目标不可达问题的多重改进方法进行原理分析和方法总结,并根据人工势场法在工业机器人中的应用对已有的算法融合方法进行分类综述。最后通过对多种改进方法的比较,对农业机....
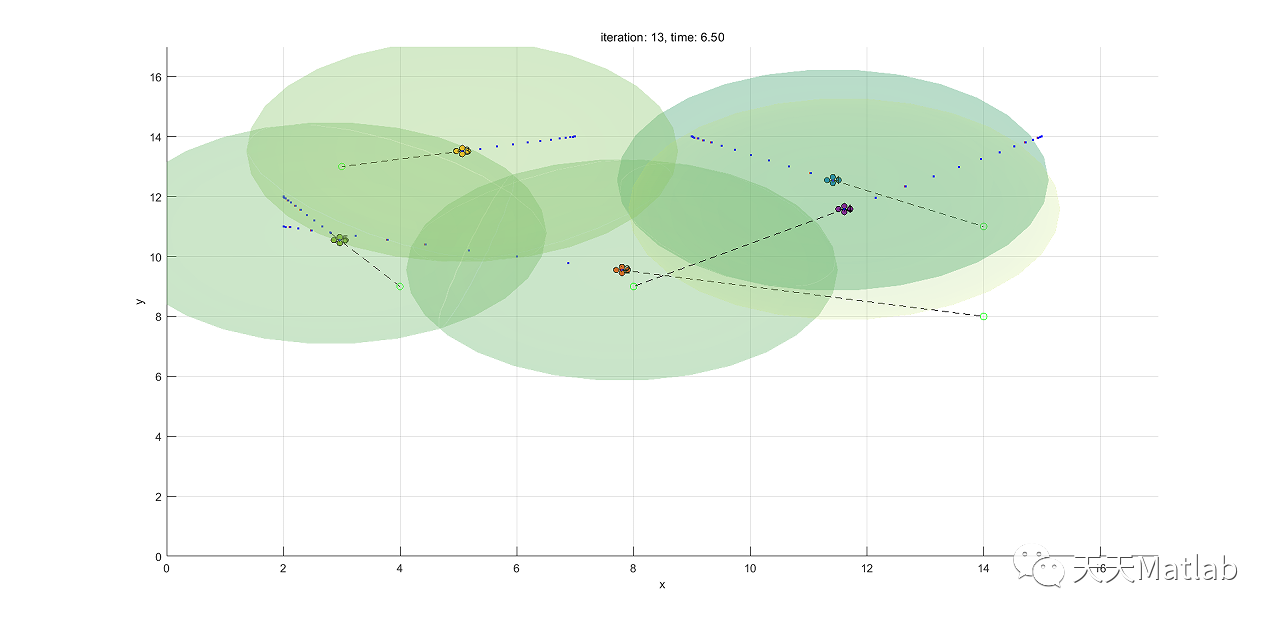
复杂环境下多移动机器人路径规划研究(Matlab代码实现)
1 概述针对多移动机器人运动协调中的动态安全避碰问题,在分析速度障碍法原理的基础上,设计用于机器人之间相互避让的互动速度法则,并通过制定机器人的碰撞时间、碰撞距离因子对构型障碍的大小进行实时调整,把运动障碍物、动力学约束下的多步可达窗口、目标点都映射到一种速度变化空间当中,使多机器人的动态避碰问题转化为一种最优化问题,并构造了新的优化评价函数;设计了基于改进速度障碍法的机器人动态避碰规划算法。仿....
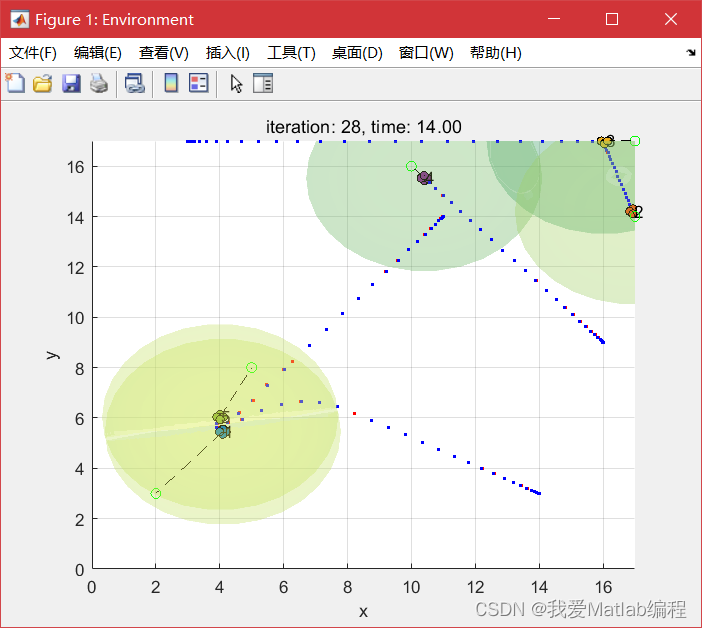
复杂环境下多移动机器人路径规划研究附Matlab代码
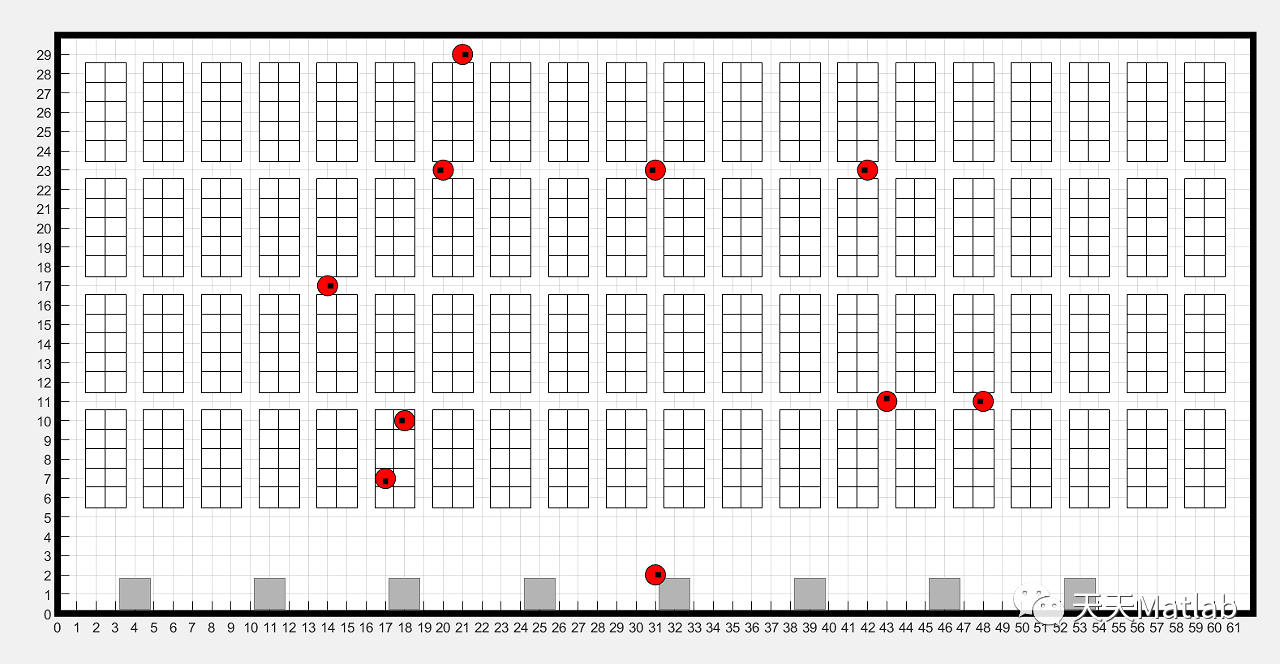
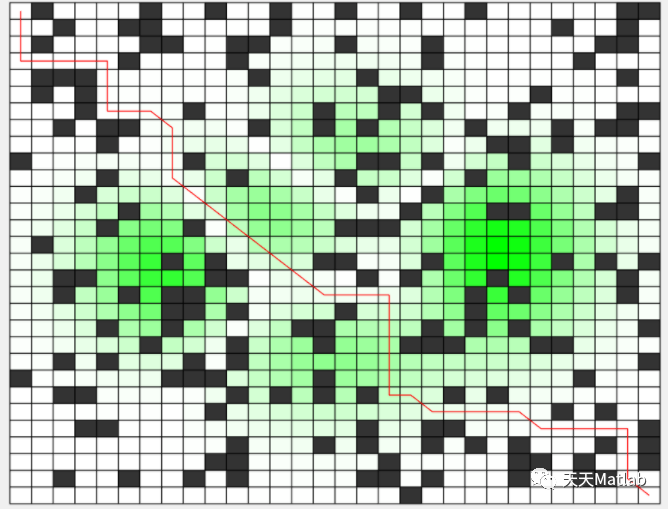
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab仿真内容点击智能优化算法 神经网络预测雷达通信 无线传感器信号处理图像处理路径规划元胞自动机无人机 电力系统⛄ 内容介绍我们使用了本文[2]中描述的匈牙利赋值算法,并改编了[1]中的matlab实现。为了估计机器人团队的运....
基于冲突搜索的多机器人路径规划问题研究附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab仿真内容点击智能优化算法 神经网络预测雷达通信 无线传感器信号处理图像处理路径规划元胞自动机无人机⛄ 内容介绍随着经济全球化和互联网技术的飞速发展,电子商务逐渐渗透到人们的日常生活中,越来越多的人们随时随地地享受着网购带来....
多因素蚁群算法的移动机器人路径规划研究附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 个人主页:Matlab科研工作室个人信条:格物致知。更多Matlab仿真内容点击智能优化算法 神经网络预测雷达通信 无线传感器信号处理图像处理路径规划元胞自动机无人机⛄ 内容介绍针对蚁群算法的特点,把蚁群算法应用到移动机器人的路径规划中,在Matlab中建立移动机器人仿真系统,运用格栅法创....
RPA有哪些错误代码表
错误代码描述语意0result.success调用成功10000system.systemError系统发生错误,请稍后重试10001system.rpcCallFailed远程调用失败10002system.serviceCallFailed微服务调用失败10003system.concurren...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。

