
强化深度学习中使用Dyna-Q算法和优先遍历算法在机器人实战中的对比分析(超详细 附源码)
需要源码和环境搭建请点赞关注收藏后评论区留言并且私信~~~一、优先遍历在随机环境中,值函数变化的大小以及状态-动作对更新的优先级都受迁移概率估计值的影响,可以根据紧急程度对其更新顺序进行优先级排序,这就是优先遍历。优先遍历是一种常用的提高规划效率的分布计算方法,在一定程度上,该方法可以避免随机选择状态和动作所导致的低效率问题,在使用优先遍历法时,用一个优先队列PQueue来存储值函数变化较大的状....

强化深度学习中使用Dyna-Q算法确定机器人问题中不同规划的学习和策略实战(超详细 附源码)
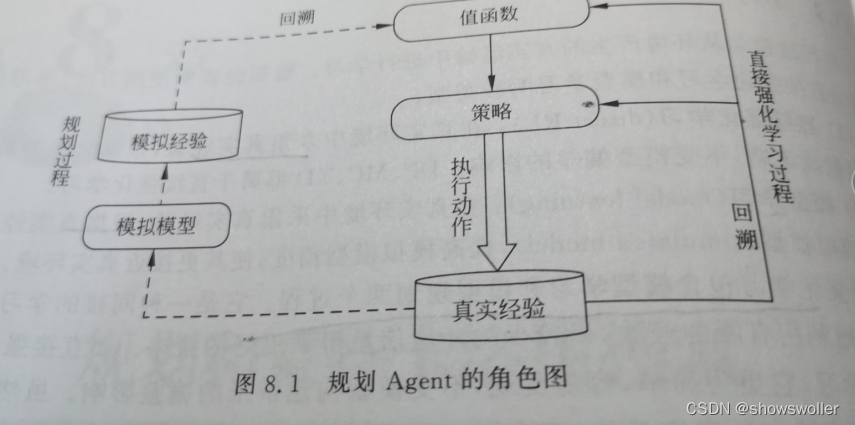
需要源码请点赞关注收藏后评论区留下QQ并且私信~~~一、模型、学习、规划简介1:模型Agent可以通过模型来预测环境并做出反应,这里所说的模型通常指模拟模型,即在给定一个状态和动作时,通过模型可以对下一状态和奖赏做出预测模型通常可以分为分布模型和样本模型两种类型分布模型:该模型可以生成所有可能的结果及其对应的概率分布样本模型:该模型能够从所有可能的情况中产生一个确定的结果从功能上讲,模型是用于模....
深度强化学习中利用Q-Learngin和期望Sarsa算法确定机器人最优策略实战(超详细 附源码)
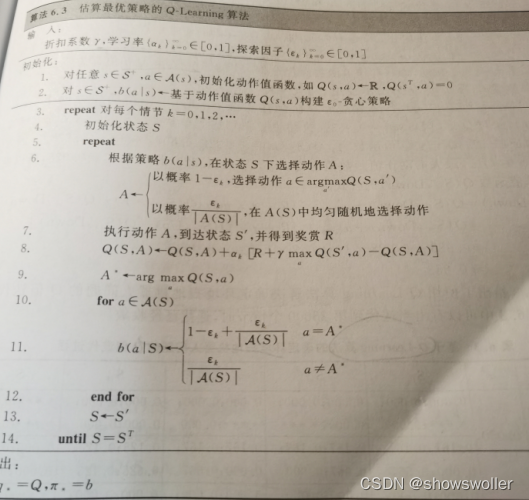
需要源码和环境搭建请点赞关注收藏后评论区留下QQ~~~一、Q-Learning算法Q-Learning算法中动作值函数Q的更新方向是最优动作值函数q,而与Agent所遵循的行为策略无关,在评估动作值函数Q时,更新目标为最优动作值函数q的直接近似,故需要遍历当前状态的所有动作,在所有状态都能被无限次访问的前提下,Q-Learning算法能以1的概率收敛到最优动作值函数和最优策略下图是估算最优策略的....
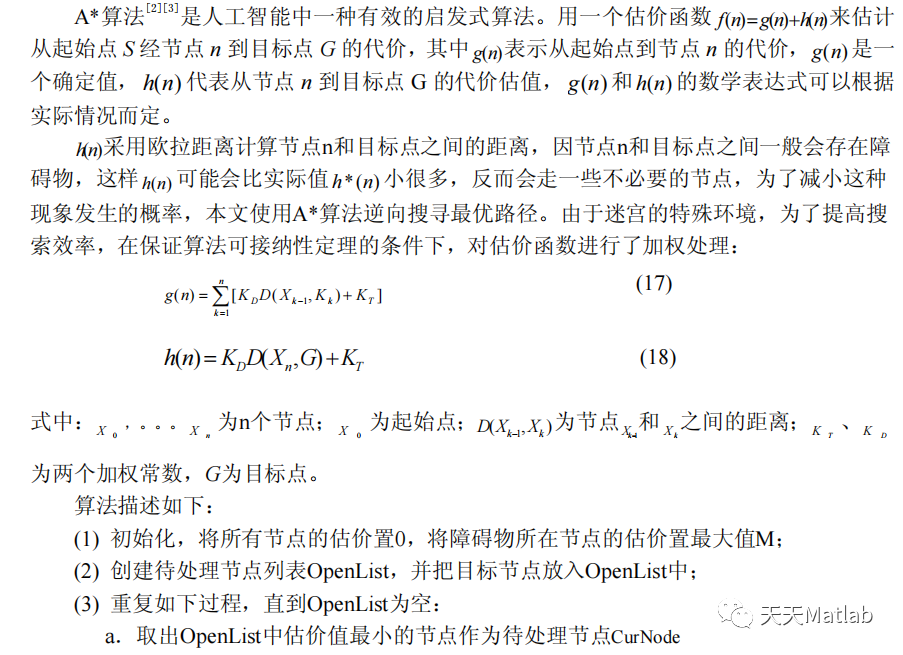
【路径规划】基于A星算法实现机器人走迷宫路径规划含Matlab源码
1 简介2 部分代码%% load mapclear;ImpRgb = imread('maze.png');Imp = rgb2gray(ImpRgb);Imp = im2bw(Imp)*255;MAX_X=size(Imp,1);MAX_Y=size(Imp,2);distanceFcn = @(p1,p2) norm(p1-p2);%% AStarGlbTab = z...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
算法更多源码相关

智能引擎技术
AI Online Serving,阿里巴巴集团搜推广算法与工程技术的大本营,大数据深度学习时代的创新主场。
+关注