
基于神经网络逆同步控制方法的两变频调速电机控制系统matlab仿真
1.课题概述 两电机变频调速系统是一个多输入多输出非线性强耦合的控制系统。本课题使用神经网络构造原系统的a阶逆系统,设计线性闭环调节器进行控制,通过matlab对系统进行仿真。对两电机变频调速系统更为精确地实现了张力和速度间的解藕控制。 2.系统仿真结果(完整程序运行后无水印) 3.核心程序与模型版本:MATLA...

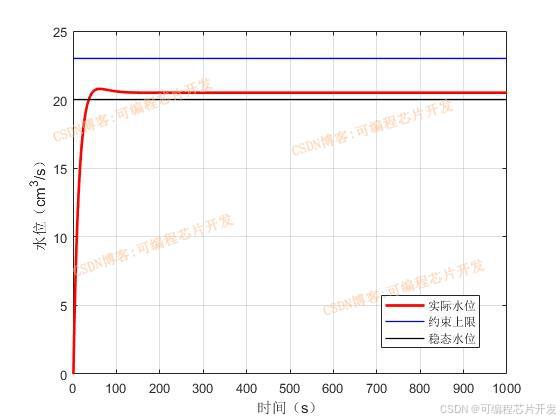
基于PID控制器的双容控制系统matlab仿真
1.课题概述基于PID控制器的双容控制系统matlab仿真,仿真输出PID控制下的水位和流量两个指标。 2.系统仿真结果(完整程序运行后无水印) 3.核心程序与模型版本:MATLAB2022a ```% 绘制结果图形t1 = 0:1:times;t2 = 0:1:(times-1);...
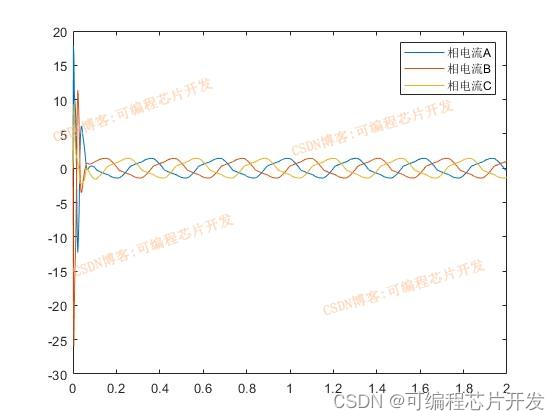
基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真
1.课题概述 基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真,使用MATLAB编程实现,包括FOC控制器,clark,park等,不使用simulink建模。仿真输出三相电流,电机转速以及转子角度。 2.系统仿真结果 3.核心程序与模型版本:MATLAB2022a...
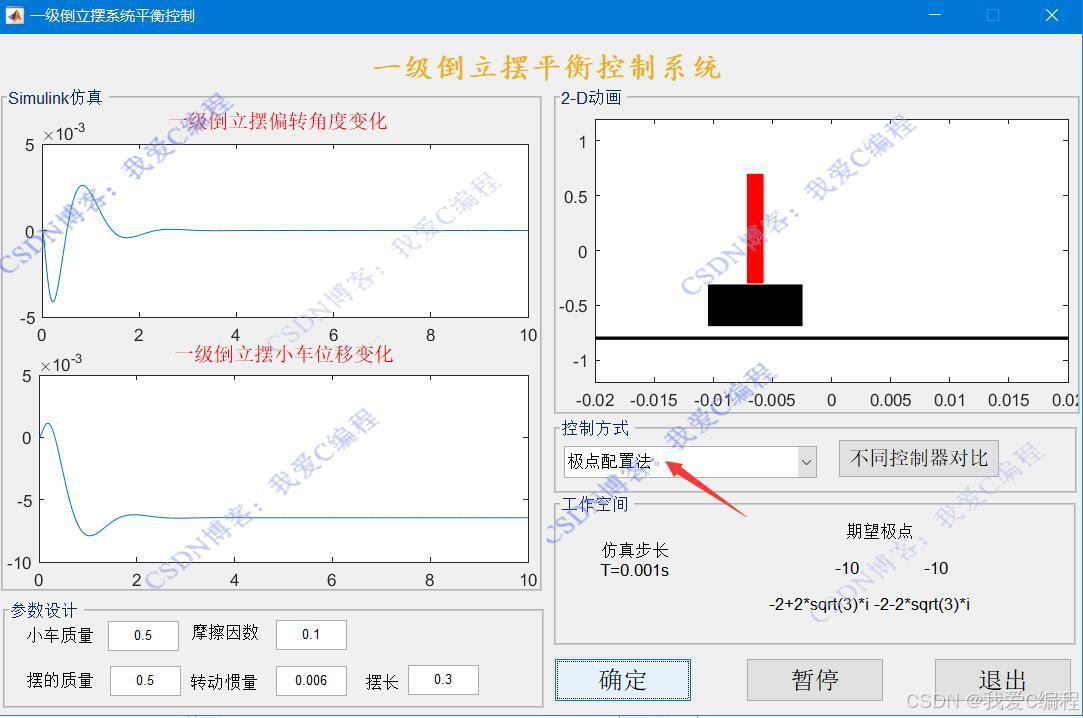
一级倒立摆平衡控制系统MATLAB仿真,可显示倒立摆平衡动画,对比极点配置,线性二次型,PID,PI及PD五种算法
1.算法仿真效果本课题是针对博主原来写的文章《基于MATLAB的一级倒立摆控制仿真,带GUI界面操作显示倒立摆动画,控制器控制输出》的升级。 升级内容包括如下几个方面:增加了PI控制器,PD控制器,同时对极点配置,线性二次型,PID,PI及PD五种算法的控制输出曲线进行对比。 matlab2022a仿真结果如下(完整代码运行后...
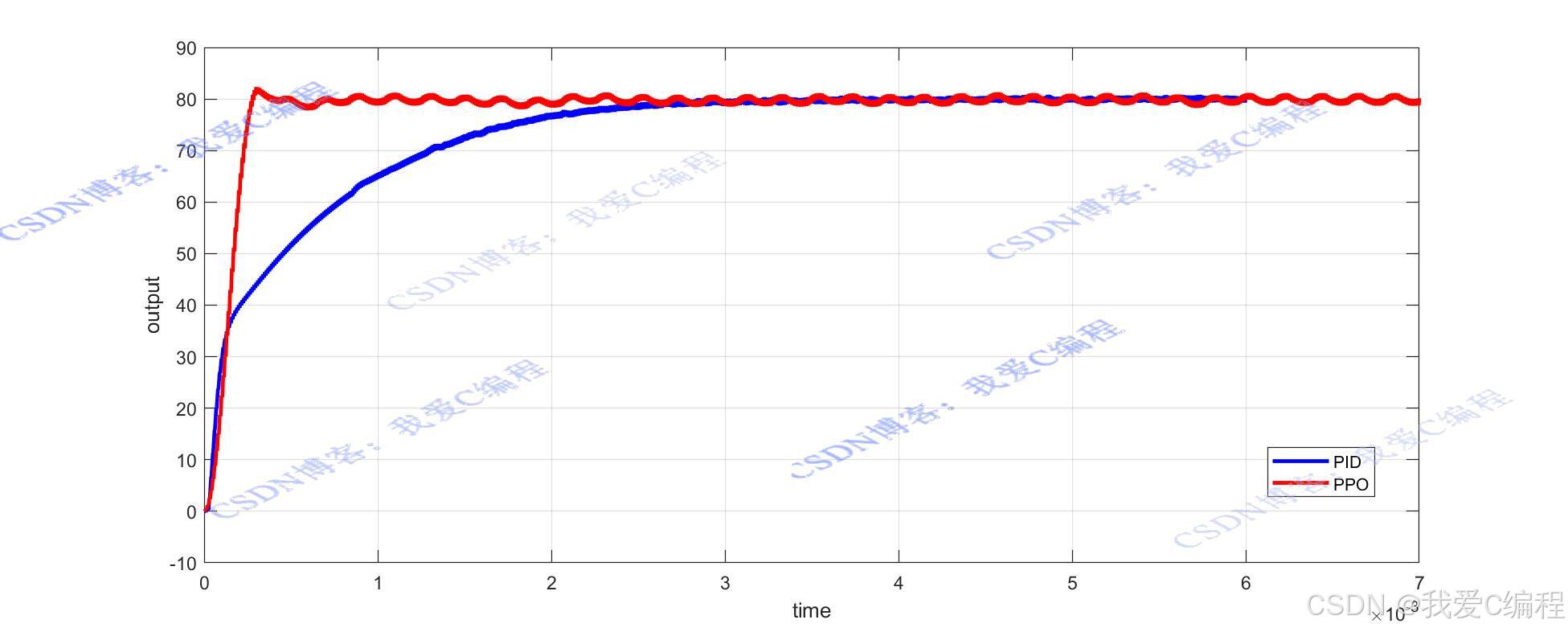
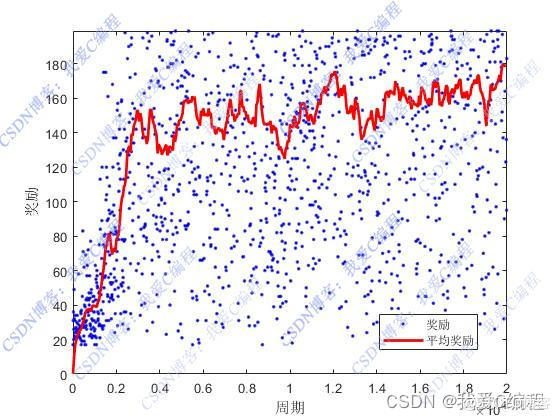
基于PPO强化学习的buckboost升降压电路控制系统matlab仿真,对比PID控制器
1.算法仿真效果matlab2022a仿真结果如下(完整代码运行后无水印): 仿真操作步骤可参考程序配套的操作视频。 2.算法涉及理论知识概要 随着电力电子技术的不断发展,Buck-Boost 升降压电路在各种电源转换和能量管理系统中得到了广泛应用。传统的 Buck-Boost 电路控制方法通常基于固定的控制策略...
基于Actor-Critic(A2C)强化学习的四旋翼无人机飞行控制系统matlab仿真
1.算法仿真效果matlab2022a仿真结果如下(完整代码运行后无水印): 仿真操作步骤可参考程序配套的操作视频。 2.算法涉及理论知识概要 基于Actor-Critic强化学习的四旋翼无人机飞行控制系统是一种利用强化学习技术实现飞行器自主控制的方法。该方法通过构建Actor(策略网络)和Criticÿ...
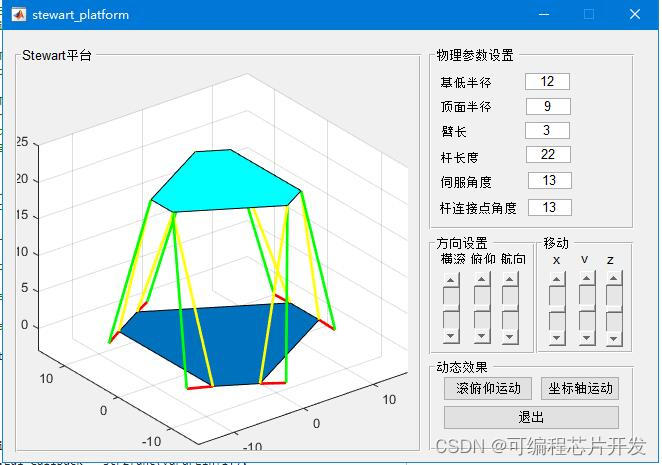
六自由度Stewart控制系统matlab仿真,带GUI界面
1.课题概述 六自由度Stewart平台控制系统是一种高精度、高稳定性的运动模拟装置,广泛应用于飞行模拟、汽车驾驶模拟、虚拟现实、精密定位等领域。其工作原理基于Stewart机构(也称为并联机构)的设计理念,通过六个独立的线性致动器(通常为液压缸或电动推杆)连接固定基座与移动平台,实现对...
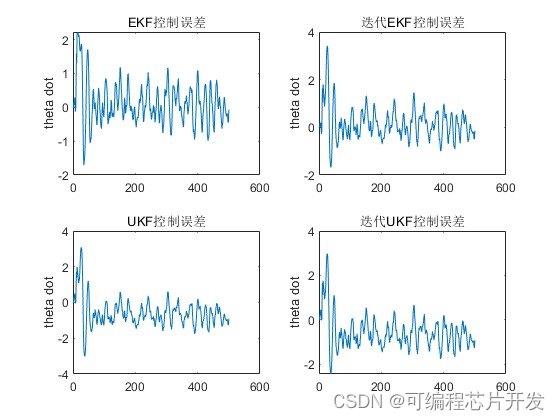
基于迭代扩展卡尔曼滤波算法的倒立摆控制系统matlab仿真
1.课题概述 基于迭代扩展卡尔曼滤波算法的倒立摆控制系统,对比UKF,EKF迭代UKF,迭代EKF四种卡尔曼滤波的控制效果。 2.系统仿真结果 3.核心程序与模型版本:MATLAB2022a X_iukf = zeros(2, Times1); X_iukf(:,1) = state0; P_iukf = zeros(2,2,Times1); P_iuk...
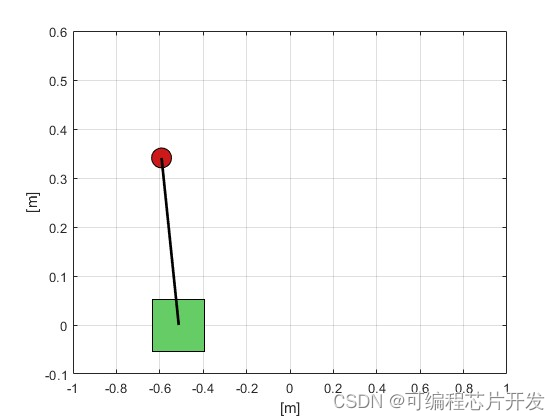
基于模糊控制算法的倒立摆控制系统matlab仿真
1.课题概述 基于模糊控制算法的倒立摆控制系统,模糊规则,模糊控制器等通过MATLAB编程实现,通过模糊控制器对小车倒立摆平衡系统进行控制,输出倒立摆从不稳定到稳定的动画过程,最后输出小车,倒立摆的收敛过程。 2.系统仿真结果 3.核心程序与模型版本:MATLAB2022a ```for ij=Ts:Ts:Tend % 计算小车位置误差 ex = xp - X(1); % 计算小车位置...
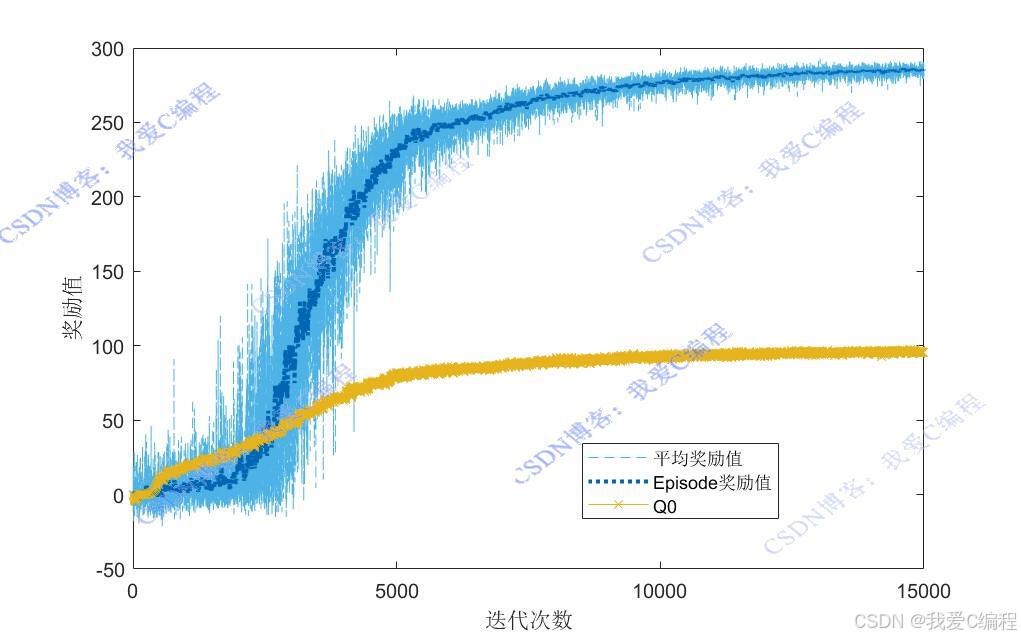
m基于Qlearning强化学习的小车倒立摆控制系统matlab仿真
1.算法仿真效果matlab2022a仿真结果如下: 2.算法涉及理论知识概要 基于Q-learning的强化学习方法应用于小车倒立摆控制系统,是通过让智能体(即控制小车的算法)在与环境的交互过程中学习到最优的控制策略,以保持倒立摆在不稳定平衡状态下的直立。Q-learning作为一种无模型的强化学习算法,特别适合解决这类动态环境下的决策问题。 Q-learning的核心在于学习一个动...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
MATLAB您可能感兴趣
大数据开发治理DataWorks
DataWorks基于MaxCompute/Hologres/EMR/CDP等大数据引擎,为数据仓库/数据湖/湖仓一体等解决方案提供统一的全链路大数据开发治理平台。
+关注